
Full resolution (JPEG) - On this page / på denna sida - H. 11. 16 mars 1946 - Maskin för dynamisk balansering, av Gunnar Svensson och Börje Langefors
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
274
\ TEKNISK TIDSKRIFT
motvikten mätes med ett fel, som är 5 % av en
rad, så erhålles en restobalans, som blir minst
5 % av den ursprungliga och med 90°
vinkel-förskjutning mot denna. Samtidiga vinkel- och
storleksfel adderas således såsom mot varandra
vinkelräta vektorer. Är storleksfelet 0,5 %
och vinkelfelet 0.005 rad blir reduceringstalet
1 / 1 000 25 = 140 vilket således kan er-
hållas med goda elektriska standardinstrument
och tillräcklig noggrannhet hos
balanseringsma-skinen i övrigt. Av dess stora känslighet kunde
man vara frestad att använda
katodstråloscillo-graf. Den har dock låg noggrannhet. Antas
skärmdiametern vara 70 mm och hälften härav
disponibel för mätutslag så blir, om avläsning kan göras
på 2 mm när. storleks- och vinkelfel 6,7 % resp.
0.067 rad. Detta ger på samma sätt som ovan ett
reduceringstal av 10,5. Detta låga värde talar mot
användandet av oscillograf i
balanseringsmaski-ner för verkstadsbruk.
Till ovan nämnda egenskaper hos en god
balanseringsmaskin komma ofta önskemålen om en
maskin, som täcker så vitt skilda behov som
möjligt beträffande drifthastighet och rotorernas
dimensioner och vikter.
Alla ovan framförda synpunkter ha varit
vägledande vid balanseringsmaskinens konstruktion.
Både kopplingsschemat och de mekaniska
konstruktionerna ha noga genomarbetats med sikte
på att så kompromisslöst som möjligt hänsyn
tagits till alla önskemål.
Beskrivning av maskinen
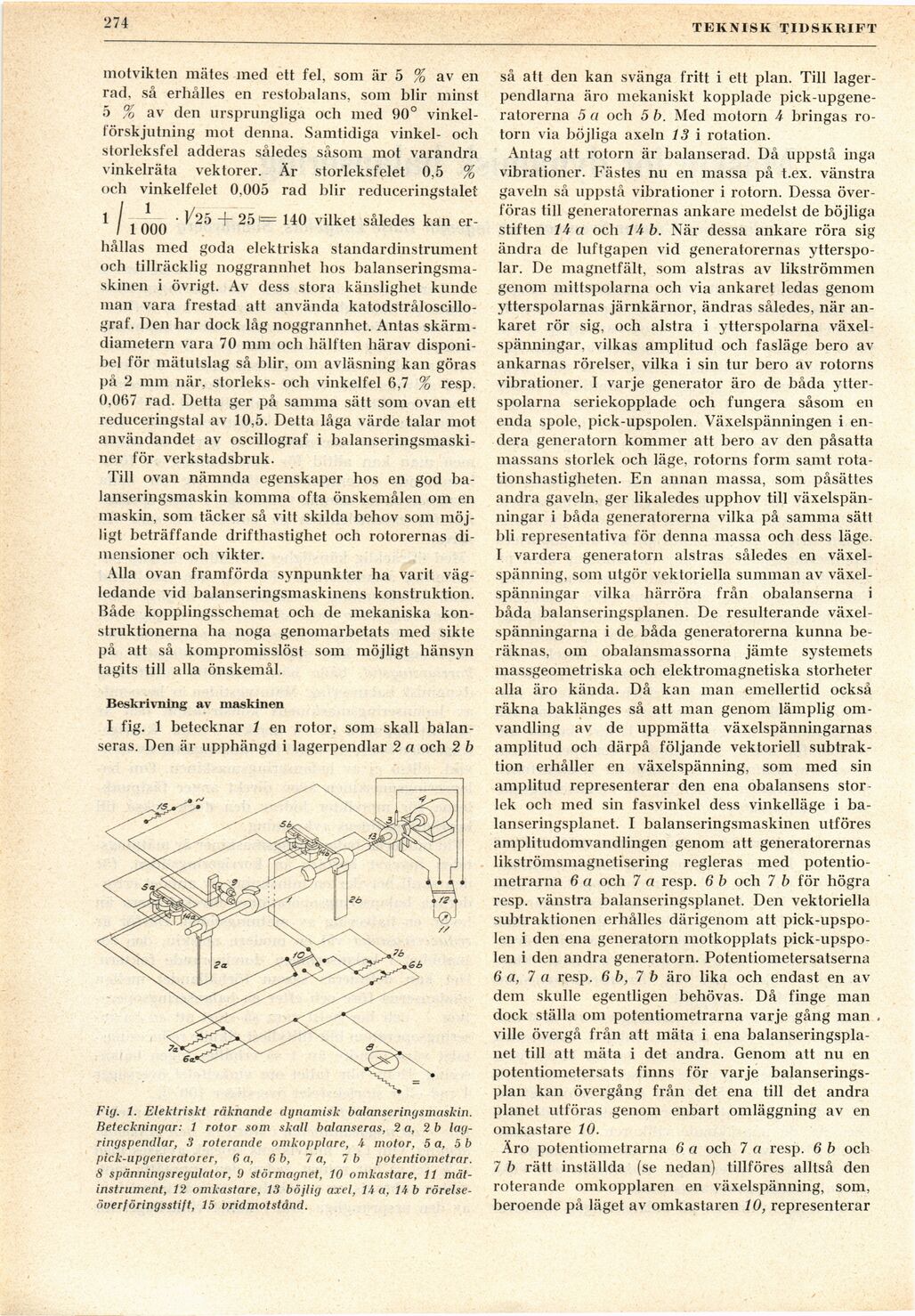
I fig. 1 betecknar 1 en rotor, som skall
balanseras. Den är upphängd i lagerpendlar 2 a och 2 b
Fig. 1. Elektriskt räknande dynamisk balanseringsmaskin.
Beteckningar: 1 rotor som skall balanseras, 2 a, 2 b
lagringspendlar, 3 roterande omkopplare, 4 motor, 5 a, 5 b
pick-upgeneratorer, 6 a, 6 b, la, Ib potentiometrar.
8 spänningsregulator, 9 störmagnet, 10 omkastare, 11
mätinstrument, 12 omkastare, 13 böjlig axel, 14 a, 14 b
rörelse-överföringsstift, 15 vridmotstånd.
så att den kan svänga fritt i ett plan. Till
lagerpendlarna äro mekaniskt kopplade
pick-upgene-ratorerna 5 a och 5 b. Med motorn 4 bringas
rotorn via böjliga axeln 13 i rotation.
Antag att rotorn är balanserad. Då uppstå inga
vibrationer. Fästes nu en massa på t.ex. vänstra
gaveln så uppstå vibrationer i rotorn. Dessa
överföras till generatorernas ankare medelst de böjliga
stiften lAa och Ut b. När dessa ankare röra sig
ändra de luftgapen vid generatorernas
ytterspo-lar. De magnetfält, som alstras av likströmmen
genom mittspolarna och via ankaret ledas genom
ytterspolarnas järnkärnor, ändras således, när
ankaret rör sig, och alstra i ytterspolarna
växelspänningar, vilkas amplitud och fasläge bero av
ankarnas rörelser, vilka i sin tur bero av rotorns
vibrationer. I varje generator äro de båda
ytterspolarna seriekopplade och fungera såsom en
enda spole, pick-upspolen. Växelspänningen i
endera generatorn kommer att bero av den påsatta
massans storlek och läge, rotorns form samt
rotationshastigheten. En annan massa, som påsättes
andra gaveln, ger likaledes upphov till
växelspänningar i båda generatorerna vilka på samma sätt
bli representativa för denna massa och dess läge.
1 vardera generatorn alstras således en
växelspänning, som utgör vektoriella summan av
växelspänningar vilka härröra från obalanserna i
båda balanseringsplanen. De resulterande
växelspänningarna i de båda generatorerna kunna
beräknas, om obalansmassorna jämte systemets
massgeometriska och elektromagnetiska storheter
alla äro kända. Då kan man emellertid också
räkna baklänges så att man genom lämplig
omvandling av de uppmätta växelspänningarnas
amplitud och därpå följande vektoriell
subtraktion erhåller en växelspänning, som med sin
amplitud representerar den ena obalansens stor
lek och med sin fasvinkel dess vinkelläge i
ba-lanseringsplanet. I balanseringsmaskinen utföres
amplitudomvandlingen genom att generatorernas
likströmsmagnetisering regleras med
potentio-metrarna 6 a och 7 a resp. 6 b och 7 b för högra
resp. vänstra balanseringsplanet. Den vektoriella
subtraktionen erhålles därigenom att
pick-upspolen i den ena generatorn motkopplats
pick-upspolen i den andra generatorn. Potentiometersatserna
6 a, la resp. 6 b, 7 b äro lika och endast en av
dem skulle egentligen behövas. Då finge man
dock ställa om potentiometrarna varje gång man .
ville övergå från att mäta i ena
balanseringsplanet till att mäta i det andra. Genom att nu en
potentiometersats finns för varje
balanserings-plan kan övergång från det ena till det andra
planet utföras genom enbart omläggning av en
omkastare 10.
Äro potentiometrarna 6 a och 7 a resp. 6 b och
7 b rätt inställda (se nedan) tillföres alltså den
roterande omkopplaren en växelspänning, som,
beroende på läget av omkastaren 10, representerar
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}