
Full resolution (JPEG) - On this page / på denna sida - H. 12. 20 mars 1948 - Teori för servostyrningar, av Laszlo von Hámos

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
13 mars 1948
105
Teori för servostyrningar
Dr-ingenjör Laszlo von Hàmos, Stockholm
I Tekn. T. 1948 s. 145 gavs en översikt över
servo-teknikens byggelement och
tillämpningsmöjligheter. I denna uppsats skall en inblick ges i
servo-styrningarnas teori samt i några matematiska och
experimentella metoder för behandling av
hithörande frågor. Servoteorin möjliggör icke endast
förståelsen av de ofta komplicerade förlopp, vilka
försiggå i ett givet system (analys), utan ger även
ledning vid konstruktion av servokedjor med
önskade prestanda (syntes).
Problemställning och definitioner
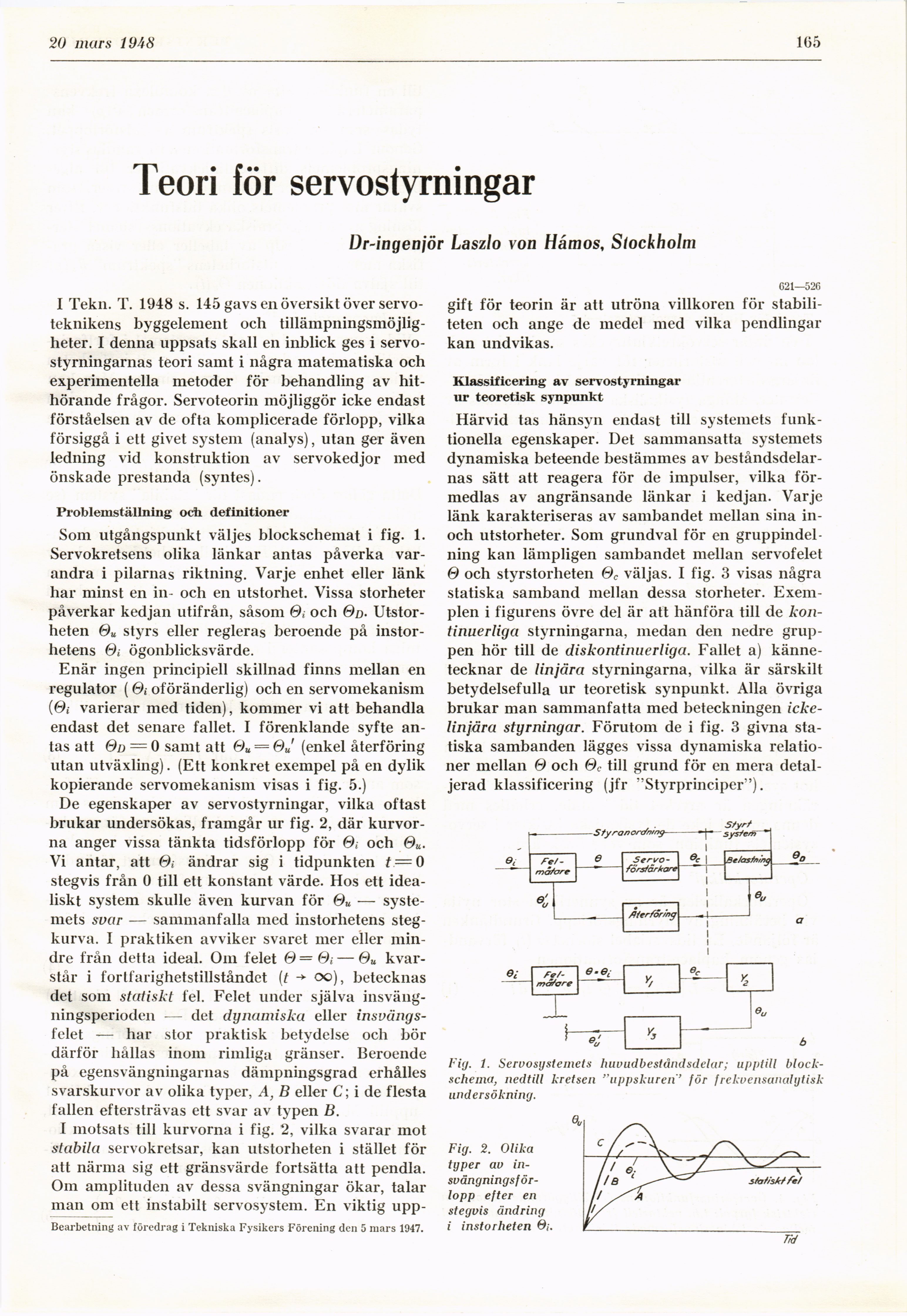
Som utgångspunkt väljes blockschemat i fig. 1.
Servokretsens olika länkar antas påverka
varandra i pilarnas riktning. Varje enhet eller länk
har minst en in- och en utstorhet. Vissa storheter
påverkar kedjan utifrån, såsom 0, och Ød•
Utstor-heten Øu styrs eller regleras beroende på
instor-hetens Øi ögonblicksvärde.
Enär ingen principiell skillnad finns mellan en
regulator (Øi oföränderlig) och en servomekanism
(Øi varierar med tiden), kommer vi att behandla
endast det senare fallet. I förenklande syfte
antas att Ød = 0 samt att Øu = ØJ (enkel återföring
utan utväxling). (Ett konkret exempel på en dylik
kopierande servomekanism visas i fig. 5.)
De egenskaper av servostyrningar, vilka oftast
brukar undersökas, framgår ur fig. 2, där
kurvorna anger vissa tänkta tidsförlopp för Øi och Øu.
Vi antar, att 01 ändrar sig i tidpunkten t = 0
stegvis från 0 till ett konstant värde. Hos ett
idealiskt system skulle även kurvan för Øu —
systemets svar — sammanfalla med instorhetens
stegkurva. I praktiken avviker svaret mer eller
mindre från detta ideal. Om felet 0—0i — Øu
kvarstår i fortfarighetstillståndet (t oo), betecknas
det som statiskt lei. Felet under själva
insvängningsperioden — det dynamiska eller
insvüngs-felet — har stor praktisk betydelse och bör
därför hållas inom rimliga gränser. Beroende
på egensvängningarnas dämpningsgrad erhålles
svarskurvor av olika typer, A, B eller C; i de flesta
fallen eftersträvas ett svar av typen B.
I motsats till kurvorna i fig. 2, vilka svarar mot
stabila servokretsar, kan utstorheten i stället för
att närma sig ett gränsvärde fortsätta att pendla.
Om amplituden av dessa svängningar ökar, talar
man om ett instabilt servosystem. En viktig upp-
Bearbetning av föredrag i Tekniska Fysikers Förening den 5 mars 1947.
C21—526
gift för teorin är att utröna villkoren för
stabiliteten och ånge de medel med vilka pendlingar
kan undvikas.
Klassificering av servostyrningar
ur teoretisk synpunkt
Härvid tas hänsyn endast till systemets
funktionella egenskaper. Det sammansatta systemets
dynamiska beteende bestämmes av
beståndsdelarnas sätt att reagera för de impulser, vilka
förmedlas av angränsande länkar i kedjan. Varje
länk karakteriseras av sambandet mellan sina
in-och utstorheter. Som grundval för en
gruppindelning kan lämpligen sambandet mellan servofelet
0 och styrstorheten Øc väljas. I fig. 3 visas några
statiska samband mellan dessa storheter.
Exemplen i figurens övre del är att hänföra till de
kontinuerliga styrningarna, medan den nedre
gruppen hör till de diskontinuerliga. Fallet a)
kännetecknar de linjära styrningarna, vilka är särskilt
betydelsefulla ur teoretisk synpunkt. Alla övriga
brukar man sammanfatta med beteckningen
ickelinjära styrningar. Förutom de i fig. 3 givna
statiska sambanden lägges vissa dynamiska
relationer mellan 0 och Øc till grund för en mera
detaljerad klassificering (jfr "Styrprinciper").
Fig. 1. Servosystemets huvudbeståndsdelar; upptill
blockschema, nedtill kretsen "uppskuren’ för frekvensanalytisk
undersökning.
Fig. 2. Olika
typer av
insvängningsförlopp efter en
stegvis ändring
i instorheten Si.
Tid
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}