
Full resolution (JPEG) - On this page / på denna sida - H. 12. 20 mars 1948 - Teori för servostyrningar, av Laszlo von Hámos

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
13 mars 1948
167
och
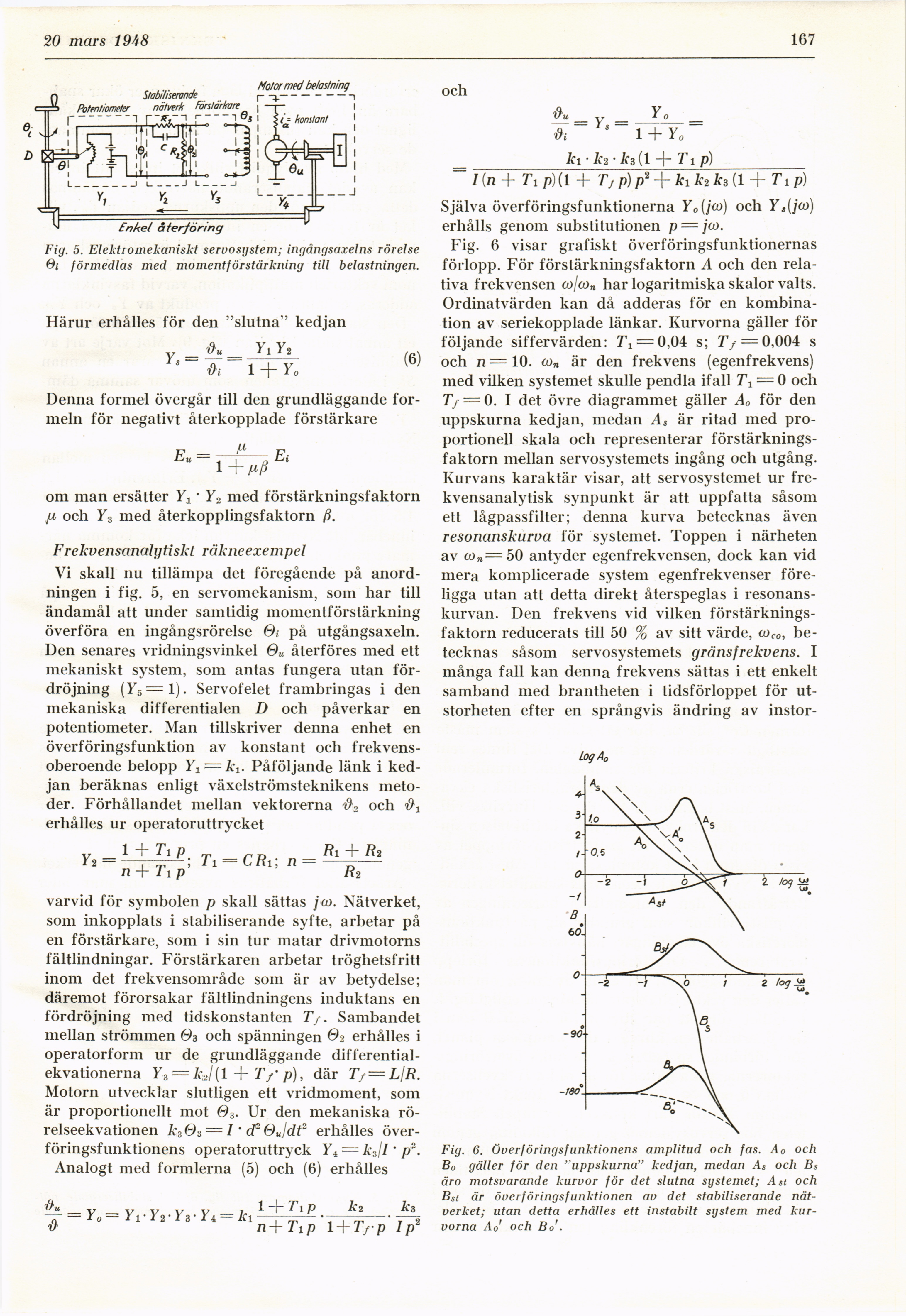
Fig. 5. Elektromekaniskt servosystem; ingångsaxelns rörelse
@i förmedlas med momentförstärkning till belastningen.
Härur erhålles för den "slutna" kedjan
Yi Y2
(6)
Denna formel övergår till den grundläggande
formeln för negativt återkopplade förstärkare
Eu —
fxß
Ei
om man ersätter Yx • Y2 med förstärkningsfaktorn
ja och Y3 med återkopplingsfaktorn ß.
Frekvensctnalytiskt räkneexempel
Vi skall nu tillämpa det föregående på
anordningen i fig. 5, en servomekanism, som har till
ändamål att under samtidig momentförstärkning
överföra en ingångsrörelse <9» på utgångsaxeln.
Den senares vridningsvinkel Øu återföres med ett
mekaniskt system, som antas fungera utan
fördröjning (Yb= 1). Servofelet frambringas i den
mekaniska differentialen D och påverkar en
potentiometer. Man tillskriver denna enhet en
överföringsfunktion av konstant och
frekvensoberoende belopp Y1 = k1. Påföljande länk i
kedjan beräknas enligt växelströmsteknikens
metoder. Förhållandet mellan vektorerna och
erhålles ur operatoruttrycket
M-^p fti + Ri
i2— , „—, ii — Ltii n =-—-
n + Ti p R2
varvid för symbolen p skall sättas jæ. Nätverket,
som inkopplats i stabiliserande syfte, arbetar på
en förstärkare, som i sin tur matar drivmotorns
fältlindningar. Förstärkaren arbetar tröghetsfritt
inom det frekvensområde som är av betydelse;
däremot förorsakar fältlindningens induktans en
fördröjning med tidskonstanten Tf. Sambandet
mellan strömmen 03 och spänningen @2 erhålles i
operatorform ur de grundläggande
differentialekvationerna Y3 = kJ{l + T/-p), där Tf — L/R.
Motorn utvecklar slutligen ett vridmoment, som
är proportionellt mot 03. Ur den mekaniska
rörelseekvationen k3@3 = I’ cP&uJdf erhålles
överföringsfunktionens operatoruttryck Y4 = A*3// ’ p2.
Analogt med formlerna (5) och (6) erhålles
0
= Yo = Yi • Y2 • Y3 Yi = k]
l + Tip
ki
k3
_ TT _ Y o
ëi ~ s~ i+To~
kik2k3[l + Ti p)
I (n + Ti p][ 1 + Tf p) p2 + ki k2 k3 (1 + Ti p)
Själva överföringsfunktionerna Y0 [joo) och Y,[ja>)
erhålls genom substitutionen p = jco.
Fig. 6 visar grafiskt överföringsfunktionernas
förlopp. För förstärkningsfaktorn A och den
relativa frekvensen co/con har logaritmiska skalor valts.
Ordinatvärden kan då adderas för en
kombination av seriekopplade länkar. Kurvorna gäller för
följande siffervärden: 7\ = 0,04 s; Tf — 0,004 s
och n=10. w„ är den frekvens (egenfrekvens)
med vilken systemet skulle pendla ifall Tt = 0 och
7/ = 0. I det övre diagrammet gäller A0 för den
uppskurna kedjan, medan As är ritad med
proportionell skala och representerar
förstärkningsfaktorn mellan servosystemets ingång och utgång.
Kurvans karaktär visar, att servosystemet ur
frekvensanalytisk synpunkt är att uppfatta såsom
ett lågpassfilter; denna kurva betecknas även
resonanskurva för systemet. Toppen i närheten
av a>n=50 antyder egenfrekvensen, dock kan vid
mera komplicerade system egenfrekvenser
föreligga utan att detta direkt återspeglas i
resonanskurvan. Den frekvens vid vilken
förstärkningsfaktorn reducerats till 50 % av sitt värde, æco,
betecknas såsom servosystemets gränsfrekvens. I
många fall kan denna frekvens sättas i ett enkelt
samband med brantheten i tidsförloppet för
ut-storheten efter en språngvis ändring av instor-
n+Tip 1 + 7/p Ip*
-180
Fig. 6. Överföringsfunktionens amplitud och fas. A0 och
B0 gäller för den ’uppskurna" kedjan, medan As och Bs
äro motsvarande kurvor för det slutna systemet; Äst och
Bst är överföringsfunktionen av det stabiliserande
nätverket; utan detta erhålles ett instabilt system med
kurvorna Ao och Bo’.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}