
Full resolution (JPEG) - On this page / på denna sida - H. 25. 19 juni 1948 - Nya autopiloter för flygplan, av Sven Malmström
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
12 juni 19A8
405
Nya autopiloter för flygplan
Civilingenjör Sven Malmström, Stockholm
621-526 : 629.135.014.57
Under kriget gjordes en rad betydelsefulla framsteg på
autopilotens område. Utvecklingen främjades av att man
började använda betydligt större flygplan, som var tunga
att manövrera för hand, och därav, att man för
bombfällning och astronomisk navigation krävde en kraftig
ökning av styrningsnoggrannheten.
Under 1930-talet var amerikanska och tyska autopiloter
vanligast. Amerikanarna arbetade huvudsakligen på
autopiloter för passagerarplan, och den autopilot, som då
nådde och fortfarande har den största utbredningen, är
Sperry-piloten typ A2. Den är konstruerad rakt på sak,
relativt enkelt och utan slöseri med finesser. Den är
driftsäker men fordrar stor noggrannhet vid tillverkning och
service. Kurshållningen är måttligt noggrann men mjuk
och behaglig. Konstruktionen har bibehållits i stort sett
oförändrad ända fram till kriget, då den moderniserades
till en förminskad version med beteckningen A-3.
Tyskarna visade stort intresse för autopiloternas
principiella förbättring, speciellt för effektivare kurshållning.
Detta sammanhänger kanske med, att de redan tidigt
insåg autopilotens betydelse som ett militärt hjälpmedel för
precisionsbombning. Tyskarna arbetade rationellt och, i
motsats mot vad som tycks ha varit fallet i förkrigstidens
Amerika, utnyttjade och prövade man alla erfarenheter,
som nåtts vid andra regleringsapparater. Man nöjde sig
oftast med kursstyrningar, där endast sidorodret regleras
men höjd- och skevrodren skötes manuellt. Detta var
möjligt på grund av de tyska byggnadsföreskrifternas
höga fordringar på flygplanens egenstabilitet. En Ju52 är
exempelvis ett mycket "snällt" flygplan jämfört med DC3,
vilket många förare anser oflygbart på långflygningar utan
autopilot. Kursstyrningen har gentemot den fullständiga
autopiloten fördelen av ringa vikt och lägre pris.
I de tyska Askania- och Siemens-kursstvrningarna
använde man redan långt före kriget sådana finesser som
automatisk övervakning av det kursbestämmande
kurs-gyrot från en magnetkompass, derivering en och två
gånger av kursavvikelsen ("rate response"), eftergivande
återföring med olje- eller luftkatarakt ("automatic reset")
samt "Geschwindigkeitszuordnung", en term, som innebär,
att roderutslagets hastighet (ej dess storlek) göres
proportionell mot kursavvikelsen och dess derivator, och som i
brist på bättre benämning här översättes till
"hastighetsreglering". Den motsvarande amerikanska termen
"float-ing control" ger knappast någon adekvat beskrivning av
regleringens karaktär.
Under kriget började tyskarna använda
elektronrörsför-stärkare och transduktorförstärkare i stället för de tidigare
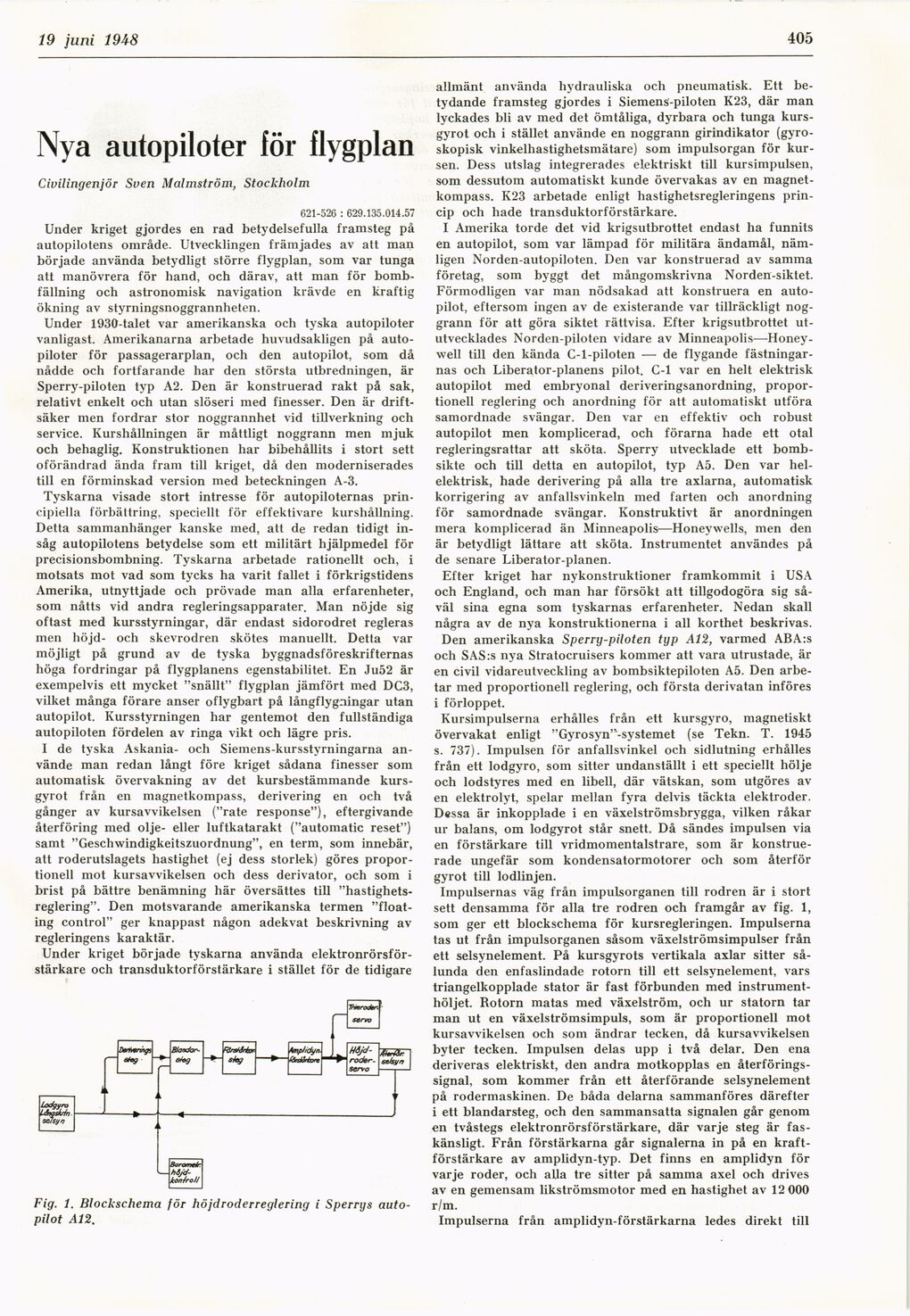
Fig. 1. Blockschema för höjdroderreglering i Sperrys
autopilot A12.
allmänt använda hydrauliska och pneumatisk. Ett
betydande framsteg gjordes i Siemens-piloten K23, där man
lyckades bli av med det ömtåliga, dyrbara och tunga
kurs-gyrot och i stället använde en noggrann girindikator
(gyro-skopisk vinkelhastighetsmätare) som impulsorgan för
kursen. Dess utslag integrerades elektriskt till kursimpulsen,
som dessutom automatiskt kunde övervakas av en
magnetkompass. K23 arbetade enligt hastighetsregleringens
princip och hade transduktorförstärkare.
I Amerika torde det vid krigsutbrottet endast ha funnits
en autopilot, som var lämpad för militära ändamål,
nämligen Norden-autopiloten. Den var konstruerad av samma
företag, som byggt det mångomskrivna Norden-siktet.
Förmodligen var man nödsakad att konstruera en
autopilot, eftersom ingen av de existerande var tillräckligt
noggrann för att göra siktet rättvisa. Efter krigsutbrottet
ut-utvecklades Norden-piloten vidare av
Minneapolis—Honey-well till den kända C-l-piloten — de flygande
fästningarnas och Liberator-planens pilot. C-l var en helt elektrisk
autopilot med embryonal deriveringsanordning,
proportionell reglering och anordning för att automatiskt utföra
samordnade svängar. Den var en effektiv och robust
autopilot men komplicerad, och förarna hade ett otal
regleringsrattar att sköta. Sperry utvecklade ett
bombsikte och till detta en autopilot, typ A5. Den var
hel-elektrisk, hade derivering på alla tre axlarna, automatisk
korrigering av anfallsvinkeln med farten och anordning
för samordnade svängar. Konstruktivt är anordningen
mera komplicerad än Minneapolis—Honeywells, men den
är betydligt lättare att sköta. Instrumentet användes på
de senare Liberator-planen.
Efter kriget har nykonstruktioner framkommit i USA
och England, och man har försökt att tillgodogöra sig
såväl sina egna som tyskarnas erfarenheter. Nedan skall
några av de nya konstruktionerna i all korthet beskrivas.
Den amerikanska Sperry-piloten typ A12, varmed ABA:s
och SAS:s nya Stratocruisers kommer att vara utrustade, är
en civil vidareutveckling av bombsiktepiloten A5. Den
arbetar med proportionell reglering, och första derivatan införes
i förloppet.
Kursimpulserna erhålles från ett kursgyro, magnetiskt
övervakat enligt "Gyrosyn"-systemet (se Tekn. T. 1945
s. 737). Impulsen för anfallsvinkel och sidlutning erhålles
från ett lodgyro, som sitter undanställt i ett speciellt hölje
och lodstyres med en libell, där vätskan, som utgöres av
en elektrolyt, spelar mellan fyra delvis täckta elektroder.
Dessa är inkopplade i en växelströmsbrygga, vilken råkar
ur balans, om lodgyrot står snett. Då sändes impulsen via
en förstärkare till vridmomentalstrare, som är
konstruerade ungefär som kondensatormotorer och som återför
gyrot till lodlinjen.
Impulsernas väg från impulsorganen till rodren är i stort
sett densamma för alla tre rodren och framgår av fig. 1,
som ger ett blockschema för kursregleringen. Impulserna
tas ut från impulsorganen såsom växelströmsimpulser från
ett selsynelement. På kursgyrots vertikala axlar sitter
sålunda den enfaslindade rotorn till ett selsynelement, vars
triangelkopplade stator är fast förbunden med
instrumenthöljet. Rotorn matas med växelström, och ur statorn tar
man ut en växelströmsimpuls, som är proportionell mot
kursavvikelsen och som ändrar tecken, då kursavvikelsen
byter tecken. Impulsen delas upp i två delar. Den ena
deriveras elektriskt, den andra motkopplas en
återförings-signal, som kommer från ett återförande selsynelement
på rodermaskinen. De båda delarna sammanföres därefter
i ett blandarsteg, och den sammansatta signalen går genom
en tvåstegs elektronrörsförstärkare, där varje steg är
fas-känsligt. Från förstärkarna går signalerna in på en
kraftförstärkare av amplidyn-typ. Det finns en amplidyn för
varje roder, och alla tre sitter på samma axel och drives
av en gemensam likströmsmotor med en hastighet av 12 000
r/m.
Impulserna från amplidyn-förstärkarna ledes direkt till
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}