
Full resolution (JPEG) - On this page / på denna sida - H. 33. 15 september 1951 - Robotar — vapen för nästa krig, av Karl-Gustav Hjerpe
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
’64
TEKNISK TIDSKRIFT
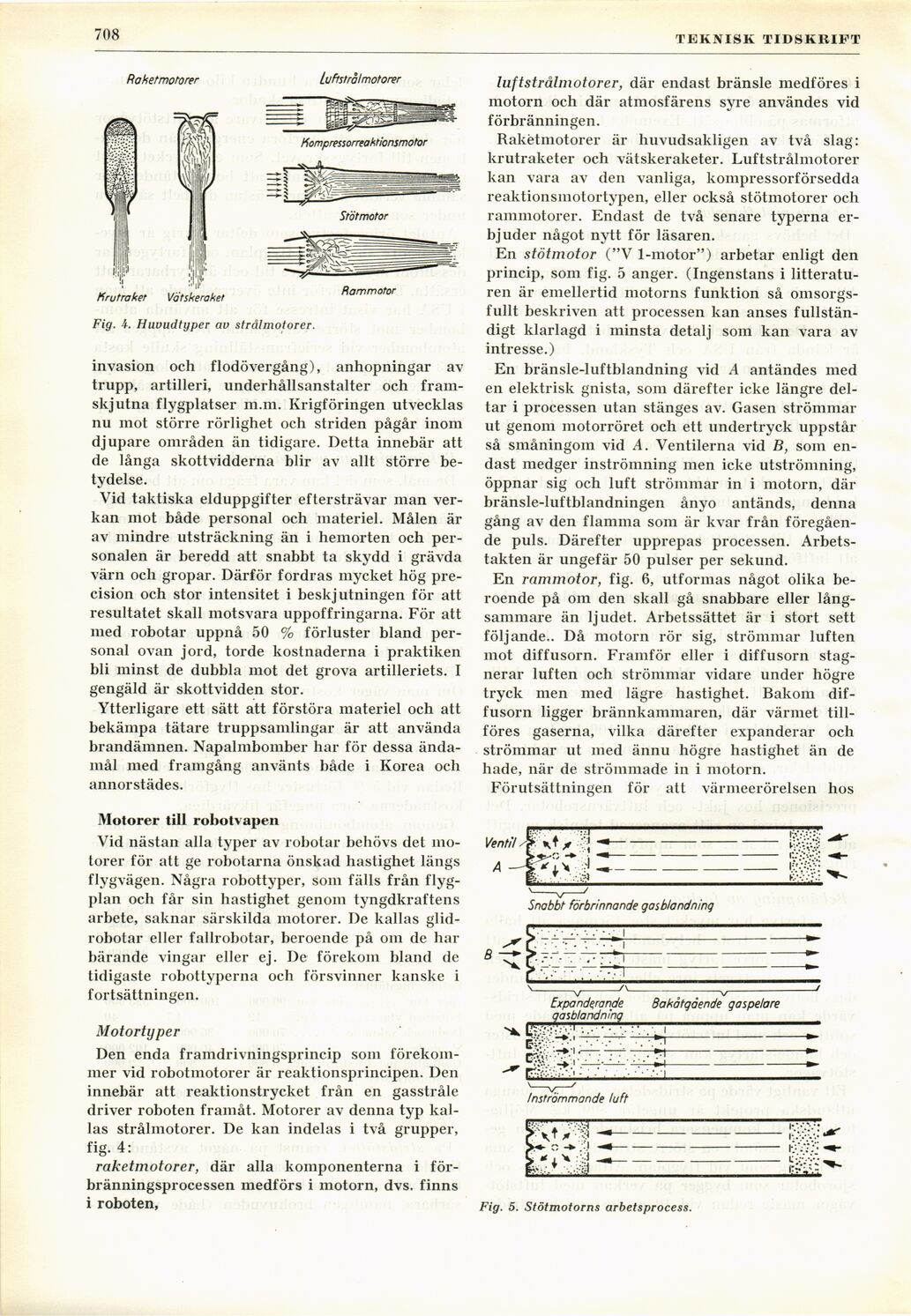
Fig. 4. Huvudtyper av strålmotorer.
invasion och flodövergång), anhopningar av
trupp, artilleri, underhållsanstalter och
framskjutna flygplatser m.m. Krigföringen utvecklas
nu mot större rörlighet och striden pågår inom
djupare områden än tidigare. Detta innebär att
de långa skottvidderna blir av allt större
betydelse.
Vid taktiska elduppgifter eftersträvar man
verkan mot både personal och materiel. Målen är
av mindre utsträckning än i hemorten och
personalen är beredd att snabbt ta skydd i grävda
värn och gropar. Därför fordras mycket hög
precision och stor intensitet i beskjutningen för att
resultatet skall motsvara uppoffringarna. För att
med robotar uppnå 50 % förluster bland
personal ovan jord, torde kostnaderna i praktiken
bli minst de dubbla mot det grova artilleriets. I
gengäld är skottvidden stor.
Ytterligare ett sätt att förstöra materiel och att
bekämpa tätare truppsamlingar är att använda
brandämnen. Napalmbomber har för dessa
ändamål med framgång använts både i Korea och
annorstädes.
Motorer till robotvapen
Vid nästan alla typer av robotar behövs det
motorer för att ge robotarna önskad hastighet längs
flygvägen. Några robottyper, som fälls från
flygplan och får sin hastighet genom tyngdkraftens
arbete, saknar särskilda motorer. De kallas
glidrobotar eller fallrobotar, beroende på om de har
bärande vingar eller ej. De förekom bland de
tidigaste robottyperna och försvinner kanske i
fortsättningen.
Motortyper
Den enda framdrivningsprincip som
förekommer vid robotmotorer är reaktionsprincipen. Den
innebär att reaktionstrycket från en gasstråle
driver roboten framåt. Motorer av denna typ
kallas strålmotorer. De kan indelas i två grupper,
fig. 4:
raketmotorer, där alla komponenterna i
förbränningsprocessen medförs i motorn, dvs. finns
i roboten,
luftstrålmotorer, där endast bränsle medföres i
motorn och där atmosfärens syre användes vid
förbränningen.
Rakëtmotorer är huvudsakligen av två slag:
krutraketer och vätskeraketer. Luftstrålmotorer
kan vara av den vanliga, kompressorförsedda
reaktionsmotortypen, eller också stötmotorer och
rammotorer. Endast de två senare typerna
erbjuder något nytt för läsaren.
En stötmotor ("V 1-motor") arbetar enligt den
princip, som fig. 5 anger. (Ingenstans i
litteraturen är emellertid motorns funktion så
omsorgsfullt beskriven att processen kan anses
fullständigt klarlagd i minsta detalj som kan vara av
intresse.)
En bränsle-luftblandning vid A antändes med
en elektrisk gnista, som därefter icke längre
deltar i processen utan stänges av. Gasen strömmar
ut genom motorröret och ett undertryck uppstår
så småningom vid A. Ventilerna vid B, som
endast medger inströmning men icke utströmning,
öppnar sig och luft strömmar in i motorn, där
bränsle-luftblandningen ånyo antänds, denna
gång av den flamma som är kvar från
föregående puls. Därefter upprepas processen.
Arbetstakten är ungefär 50 pulser per sekund.
En rammotor, fig. 6, utformas något olika
beroende på om den skall gå snabbare eller
långsammare än ljudet. Arbetssättet är i stort sett
följande.. Då motorn rör sig, strömmar luften
mot diffusorn. Framför eller i diffusorn
stagnerar luften och strömmar vidare under högre
tryck men med lägre hastighet. Bakom
diffusorn ligger brännkammaren, där värmet
tillföres gaserna, vilka därefter expanderar och
strömmar ut med ännu högre hastighet än de
hade, när de strömmade in i motorn.
Förutsättningen för att värmeerörelsen hos
Fig. 5. Stötmotorns arbetsprocess.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}