
Full resolution (JPEG) - On this page / på denna sida - H. 33. 15 september 1951 - Robotar — vapen för nästa krig, av Karl-Gustav Hjerpe
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
’64 TEKNISK TIDSKRIFT
Ballistisk utrustning
Stabilisering
Man säger att en robot flyger stabilt, om den
strävar att återta samma flygläge även sedan
man påtvingat den en måttlig störning. Det
insvängningsförlopp, varunder roboten efter
störningen återgår till detta flygläge, är vid stabil
flygning mer eller mindre dämpat.
Eftersom de luftkrafter som verkar på kropp
och vingar i allmänhet inte har sin resultant
genom robotens tyngdpunkt, inser man att
rörliga roder erfordras för att åstadkomma
momentjämvikt och därmed en längdstabiliserad
flygning. Bidragen från höjdrodren håller sålunda
det resulterande tippmomentet omkring
tväraxeln lika med noll, när luftströmmen har den
avsedda anfallsvinkeln.
Vid en gir anblåses vingar och roder i de flesta
fall mer osymmetriskt än vid tipp, varigenom
roll- och girmomenten blir samordnade. I det
allmänna fallet kan man därför vänta sig att
särskild roderverkan behövs för både gir- och
rollstabilitet.
En robot är egenstabil, 0111 den återtar visst
flygläge efter en störning, utan att rodren påverkas
av någon särskild styrmekanism. Detta kan
uppnås både i tipp- och rollplanet så länge fart,
massa och tyngdpunktsläge samt anfallsvinkel
varierar inom vissa gränser. I girled kan roboten
däremot inte vara egenstabil. Den undergår en
kursändring utan att sträva tillbaka. För att
kursen skall bibehållas måste roderutslagen följa
girstörningarna.
Fig. 8.
Hyperbel-
styrning.
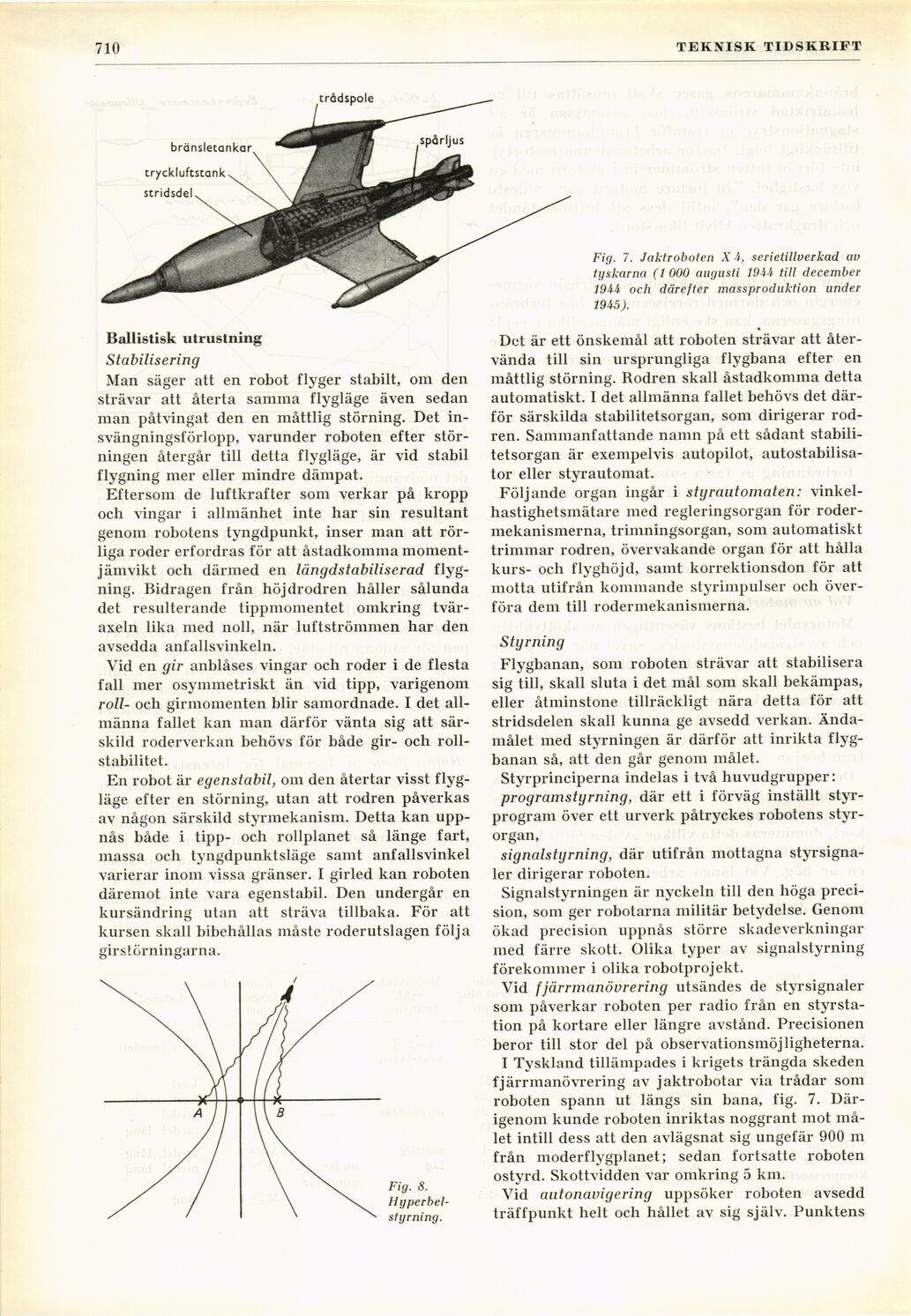
Fig. 7. Jaktroboten X 4, serietillverkad av
tyskarna (1 000 augusti 1944 till december
1944 och därefter massproduktion under
1945).
Det är ett önskemål att roboten strävar att
återvända till sin ursprungliga flygbana efter en
måttlig störning. Rodren skall åstadkomma detta
automatiskt. I det allmänna fallet behövs det
därför särskilda stabilitetsorgan, som dirigerar
rodren. Sammanfattande namn på ett sådant
stabilitetsorgan är exempelvis autopilot,
autostabilisa-tor eller styrautomat.
Följande organ ingår i styrautomaten:
vinkel-hastighetsmätare med regleringsorgan för
rodermekanismerna, trimningsorgan, som automatiskt
trimmar rodren, övervakande organ för att hålla
kurs- och flyghöjd, samt korrektionsdon för att
motta utifrån kommande styrimpulser och
överföra dem till rodermekanismerna.
Styrning
Flygbanan, som roboten strävar att stabilisera
sig till, skall sluta i det mål som skall bekämpas,
eller åtminstone tillräckligt nära detta för att
stridsdelen skall kunna ge avsedd verkan.
Ändamålet ined styrningen är därför att inrikta
flygbanan så, att den går genom målet.
Styrprinciperna indelas i två huvudgrupper:
programstyrning, där ett i förväg inställt
styrprogram över ett urverk påtryckes robotens
styrorgan,
signalstyrning, där utifrån mottagna
styrsignaler dirigerar roboten.
Signalstyrningen är nyckeln till den höga
precision, som ger robotarna militär betydelse. Genom
ökad precision uppnås större skadeverkningar
med färre skott. Olika typer av signalstyrning
förekommer i olika robotprojekt.
Vid fjärrmanövrering utsändes de styrsignaler
som påverkar roboten per radio från en
styrstation på kortare eller längre avstånd. Precisionen
beror till stor del på observationsmöjligheterna.
I Tyskland tillämpades i krigets trängda skeden
fjärrmanövrering av jaktrobotar via trådar som
roboten spann ut längs sin bana, fig. 7.
Därigenom kunde roboten inriktas noggrant mot
målet intill dess att den avlägsnat sig ungefär 900 m
från moderflygplanet; sedan fortsatte roboten
ostyrd. Skottvidden var omkring 5 km.
Vid autonavigering uppsöker roboten avsedd
träffpunkt helt och hållet av sig själv. Punktens
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}