
Full resolution (JPEG) - On this page / på denna sida - 1958, H. 36 - Fjärrmätning i robotar, av Sven Fornander

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
lättfattligt sätt för försöksledaren. Denne skall
därefter i sin tur via ett fjärrkontrollsystem
kunna påverka försöksloppet, så att det
önskade informationsflödet ökas, fig. 1.
Givetvis kan fjärrförsök helautomatiseras. I
en variant av det slutna fjärrförsökssystemet
kan man tänka sig att någon robotapparat i ett
tidigt utvecklingsskede — kanske bara som en
modell i en beräkningsmaskin — kopplas in,
medan den står i ett laboratorium. Man har här
ömvändningen till det vanligare förfarandet,
då en verklig apparat kopplas samman med ett
flygplan eller en robot simulerad med en
beräkningsmaskin.
Den tidiga planeringen av proven med
robotarna i försöksserien innebär, att man
detalj-studerar hela roboten, dess utrustning och
funktioner. Man erhåller då ett ungefärligt
mått på den osäkerhet i robotens beteende,
som man genom mätningar skall överföra i
visshet. Den motsvarande
informationsmängden, som skall insamlas, är produkten av
provtiden och de använda mätsystemens
informationskapacitet. Härtill måste läggas volymen
hos vissa övervakade mätningar. Vid
provplaneringen är det viktigt att rätt mätmetodik
utarbetas för olika prov.
Mätmetoderna skall vara sådana att önskad
information erhålles med minsta
noggrannhetskrav på mätapparaturen, dvs. på billigaste
sätt. Frågorna är av typen: Skall
fjärrmätsyste-met användas eller kan viss information fås
lättare genom yttre mätningar med teodoliter,
dopplerradar etc.? Hur många mätställen
behövs i roboten, hur ofta behöver varje
mätställe avkännas, vilken noggrannhet behövs,
hur stort mätområde fordras ...?
Robotkonstruktörernas önskemål om mätdata måste
sammanlagras och prutas så att fjärrmätsystemet
blir realiserbart.
Den tidigare nämnda naturliga indelningen
av provserien i grupper för prov av motor,
flygegenskaper, styrning, specialutrustning etc.
innebär, att fjärrmätsystemet måste vara
mycket flexibelt. Hur många robotar som behöver
skjutas i varje provgrupp kan delvis bero på
hur stor plats som finns för fjärrmätapparatur
i roboten, och vilken informationskapacitet
man får med system, som kan rymmas i det
anvisade utrymmet (eller utanpå roboten). I
huvudsak bestäms dock antalet provrobotar av
att man vill ha en viss statistiskt verifierad
sannolikhet för att roboten i det aktuella
utvecklingsskedet fungerar på önskat sätt, så att
arbetet kan fortsättas. Givetvis ingår i
planeringen av fjärrmätsystemet också utrustningen
på marken. Vilken mottagar- och
databehandlingsutrustning behöver skaffas eller finns
tillgänglig? Hur skall den nyttjas på bästa sätt?
Fjärrmätning
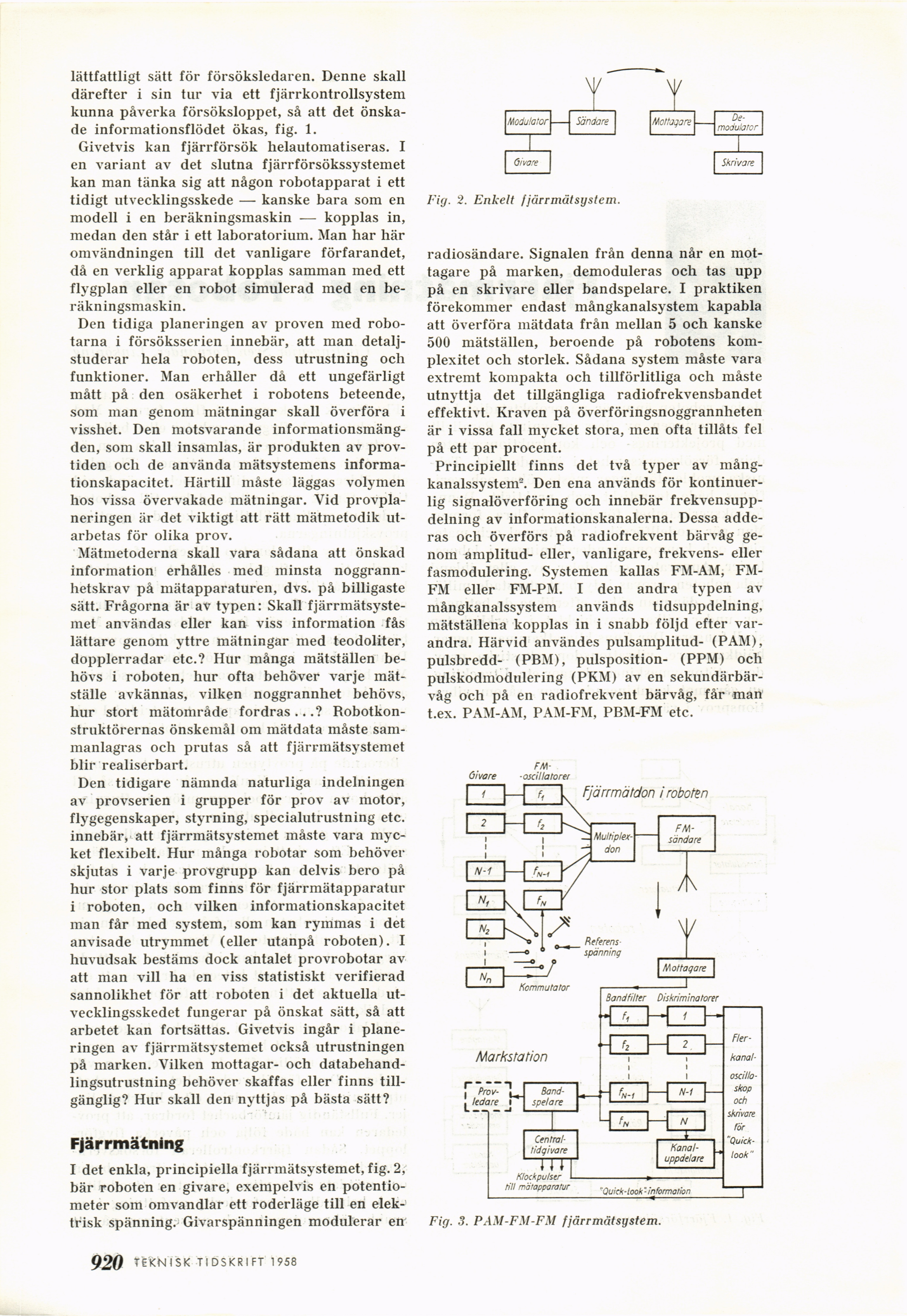
I det enkla, principiella fjärrmätsystemet, fig. 2,
bär roboten en givare, exempelvis en
potentiometer som omvandlar ett roderläge till en
elektrisk spänning. Givarspänningen modulerar en
Fig. 2. Enkelt fjärrmätsystern.
radiosändare. Signalen från denna når en
mottagare på marken, demoduleras och tas upp
på en skrivare eller bandspelare. I praktiken
förekommer endast mångkanalsystem kapabla
att överföra mätdata från mellan 5 och kanske
500 mätställen, beroende på robotens
komplexitet och storlek. Sådana system måste vara
extremt kompakta och tillförlitliga och måste
utnyttja det tillgängliga radiofrekvensbandet
effektivt. Kraven på överföringsnoggrannheten
är i vissa fall mycket stora, men ofta tillåts fel
på ett par procent.
Principiellt finns det två typer av
mång-kanalssystem2. Den ena används för
kontinuerlig signalöverföring och innebär
frekvensuppdelning av informationskanalerna. Dessa
adderas och överförs på radiofrekvent bärvåg
genom amplitud- eller, vanligare, frekvens- eller
fasmodulering. Systemen kallas FM-AM,
FM-FM eller FM-PM. I den andra typen av
mångkanalssystem används tidsuppdelning,
mätställena kopplas in i snabb följd efter
varandra. Härvid användes pulsamplitud- (PAM),
pulsbredd- (PBM), pulsposition- (PPM) och
pulskodmodtilering (PKM) av en
sekundärbärvåg och på en radiofrekvent bärvåg, får man
t.ex. PAM-AM, PAM-FM, PBM-FM etc.
Fig. 3. PAM-FM-FM fjärrmätsy stern.
920 teknisk tidskrift 1958
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}