
Full resolution (JPEG) - On this page / på denna sida - 1962, H. 40 - Adaptiv reglering, av fil. lic. Nils Åslund, Stockholm

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
En reglerkrets utgör definitionsmässigt ett
dynamiskt system, och den yttersta målsättningen
för kretsen kommer därför ofta att gälla dess
dynamiska egenskaper. Man söker kretsar, där
dynamiken i något avseende är optimal.
Exempelvis kan man söka den krets bland de enligt
förutsättningarna tillåtna reglerkretsarna där
kvadratmedelvärdet på regleravvikelsen är
minsta möjliga. Alternativt kan man söka efter
den krets, som tillåter den snabbaste
förflyttningen från elt dynamiskt tillstånd till ett
annat. Det skuHe emellertid föra alldeles för långt
att i detta sammanhang gå in på en
redogörelse för några av resultaten inom
forskningsområdet optimal reglering (Tekn. T. 1961 s. 529).
Vi får nöja oss med att konstatera, att man
inom modern regleringsteknik eftersträvar och
i många fall också har lyckats att formulera
korrekt ställda optimeringsproblem för
syntetiserandet av reglersystem.
De explicita lösningarna till dylika problem
ger de optimala värdena på olika fria
parametrar i reglerutrustningen. Som exempel på
optimala reglersystem kan nämnas de, som arbetar
efter "dead-beat"-strategin, och de, som
arbetar efter "bang-bang"-strategin. I det förra
fallet rör det sig om pulsad reglering av linjära
verk, i det senare fallet ligger begränsningen
i att instorheterna till verket måste tillhöra
vissa föreskrivna variationsområden. I båda
fallen erhåller man det reglersystem, som för ett
givet verk ger den snabbaste förflyttningen
från ett tillstånd till ett annat.
En för det följande resonemanget intressant
fråga gäller hur man experimentellt kan
bestämma, om ett optimalt reglersystem av någon
viss typ är korrekt injusterat eller ej. Vid den
spektrökemiska analysen har vi konstaterat, att
man kan kontrollera systemets korrekta
funktion genom att använda prov av känd kemisk
sammansättning. Motsvarigheten till en dylik
kontroll när elementarprocessen utgör en
reglerkrets bör bestå i någon form av dynamiskt
experiment. Man kan exempelvis påtvinga
kretsen en instorhet av känd karaktär och
analysera den resulterande utstorheten. Alternativt
kan den instorhet, som normalt styr kretsen,
erbjuda tillräckliga variationer för att gälla
som testsignal.
Vilketdera fallet än är kommer experimentet
att kräva viss tid, och detta oavsett om
mätningarna av in- och utstorheter är
brusöver-lagrade eller ej. Som sammanfattning
observerar vi, att kontrollen om injusteringen är
optimal eller ej i princip kan lösas på samma sätt
om kretsen utgöres av en reglerkrets eller ej,
men att problemets lösande är av högre
svårighetsgrad i det förra fallet på grund av
problemets dynamiska karaktär.
I vilka tillämpningsfall har man då anledning
befara, att de ursprungliga betingelserna för
den optimala injusteringen av reglerkretsen
skall ha ändrats därhän, att en omjustering är
nödvändig? Dylika fall har man i första hand
träffat på inom flyg- och rymdfartstekniken,
och det är också en flygtekniker, Charles S
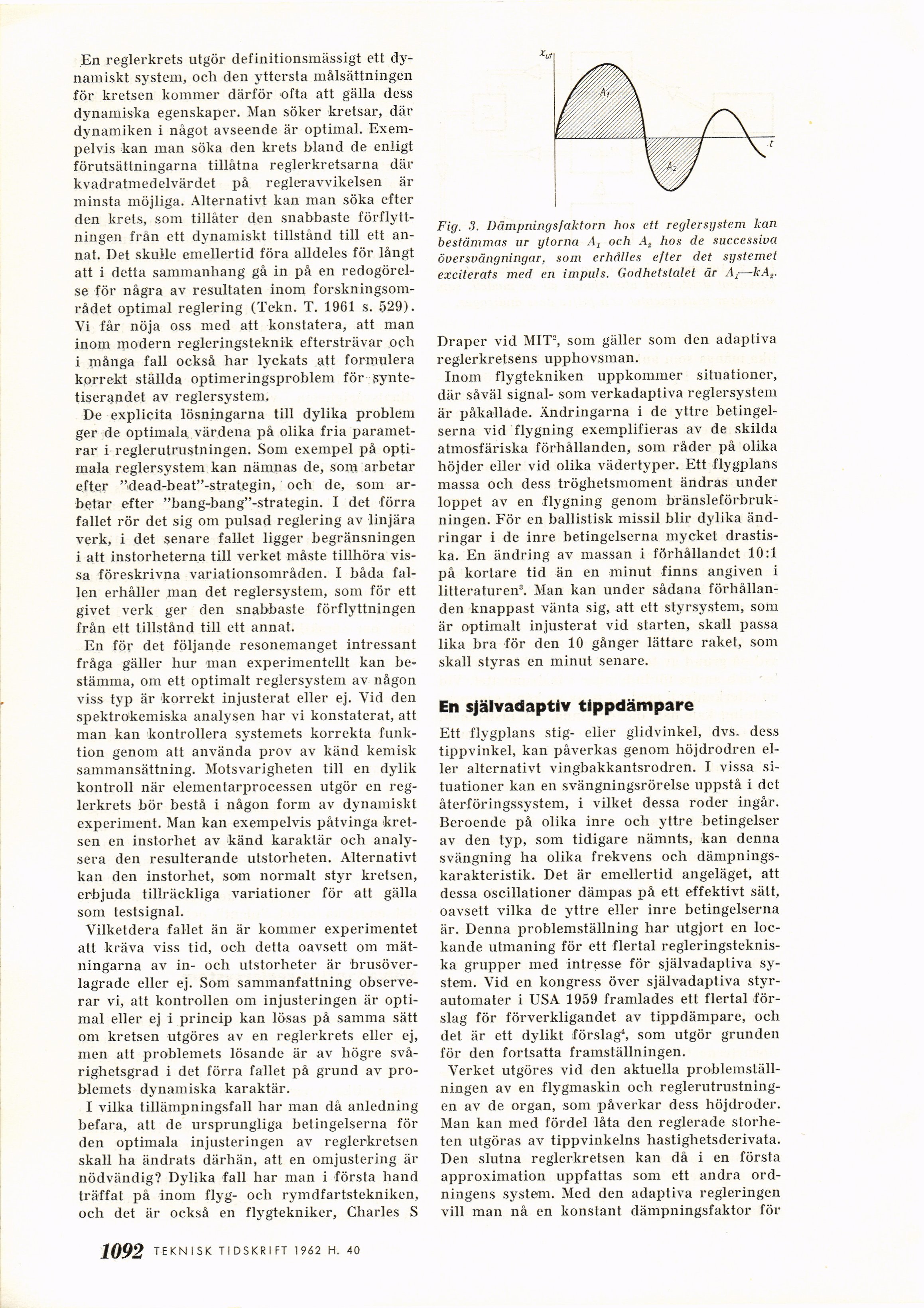
Fig. 3. Dämpnings faktorn hos ett reglersystem kan
bestämmas ur ytorna A, och A„ hos de successiva
översvängningar, som erhålles efter det systemet
exciterats med en impuls. Godhetstalet är At—kA2.
Dräper vid MITS, som gäller som den adaptiva
reglerkretsens upphovsman.
Inom flygtekniken uppkommer situationer,
där såväl signal- som verkadaptiva reglersystem
är påkallade. Ändringarna i de yttre
betingelserna vid flygning exemplifieras av de skilda
atmosfäriska förhållanden, som råder på olika
höjder eller vid olika vädertyper. Ett flygplans
massa och dess tröghetsmoment ändras under
loppet av en flygning genom
bränsleförbrukningen. För en ballistisk missil blir dylika
ändringar i de inre betingelserna mycket
drastiska. En ändring av massan i förhållandet 10:1
på kortare tid än en minut finns angiven i
litteraturen3. Man kan under sådana
förhållanden knappast vänta sig, att ett styrsystem, som
är optimalt injusterat vid starten, skall passa
lika bra för den 10 gånger lättare raket, som
skall styras en minut senare.
En självadaptiv tippdämpare
Ett flygplans stig- eller glidvinkel, dvs. dess
tippvinkel, kan påverkas genom höjdrodren
eller alternativt vingbakkantsrodren. I vissa
situationer kan en svängningsrörelse uppstå i det
återföringssystem, i vilket dessa roder ingår.
Beroende på olika inre och yttre betingelser
av den typ, som tidigare nämnts, kan denna
svängning ha olika frekvens och
dämpningskarakteristik. Det är emellertid angeläget, att
dessa oscillationer dämpas på ett effektivt sätt,
oavsett vilka de yttre eller inre betingelserna
är. Denna problemställning har utgjort en
lockande utmaning för ett flertal
regleringstekniska grupper med intresse för självadaptiva
system. Vid en kongress över självadaptiva
styrautomater i USA 1959 framlades ett flertal
förslag för förverkligandet av tippdämpare, och
det är ett dylikt förslag4, som utgör grunden
för den fortsatta framställningen.
Verket utgöres vid den aktuella
problemställningen av en flygmaskin och
reglerutrustningen av de organ, som påverkar dess höjdroder.
Man kan med fördel låta den reglerade
storheten utgöras av tippvinkelns hastighetsderivata.
Den slutna reglerkretsen kan då i en första
approximation uppfattas som ett andra
ordningens system. Med den adaptiva regleringen
vill man nå en konstant dämpningsfaktor för
1092 TEKNISK TIDSKRIFT 1 962 H. 40
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}