
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
MEKANIK
och A en godtycklig punkt. Vinkelrätt mot
figurens plan gå axlar genom T och A.
Tröghetsmomentet för de båda axlarna be*
tecknas med /0 resp. IA. Följande sats gäller
IA=I0+Mp2
Tröghetsmomentet med avseende på en
godtycklig axel är lika med tröghetsmo*
mentet för en med denna parallell axel
genom tyngdpunkten ökat med kroppens
massa gånger axlarnas inbördes avstånd
i kvadrat.
Tröghetsradie. Om tröghetsmomentet skri*
ves
I = Mk2
kallas k för tröghetsradien, k är radien i
den ring (eller det cylindriska skal), som
skulle ha samma tröghetsmoment som
kroppen i fråga, om massan M vore jämnt
fördelad över ringen (eller det cylindriska
skalet).
Tröghetsprodukten (deviationsmomentet)
för en kropp med avseende på två ytor är
Dz= J~xy dm
x och y äro masselementets vinkelräta av*
stånd från yz= resp. xz=planen. Tröghets*
produkterna kunna vara både positiva och
negativa.
Sambandet mellan tröghetsmomenten med
avseende på olika axlar genom samma punkt.
I den i rubriken nämnda punkten lägges
origo för ett rätvinkligt koordinatsystem.
Tröghetsmomentet för den axel, som med
koordinatsystemets axlar bildar vinklarna
a, ß och y kallas I. Då gäller
I—Ix eos2 a+Iy eos2 ß+Iz eos2 y—
—2Dx eos ß eos y—2Dy eos y eos a—
—2Dz eos a eos ß
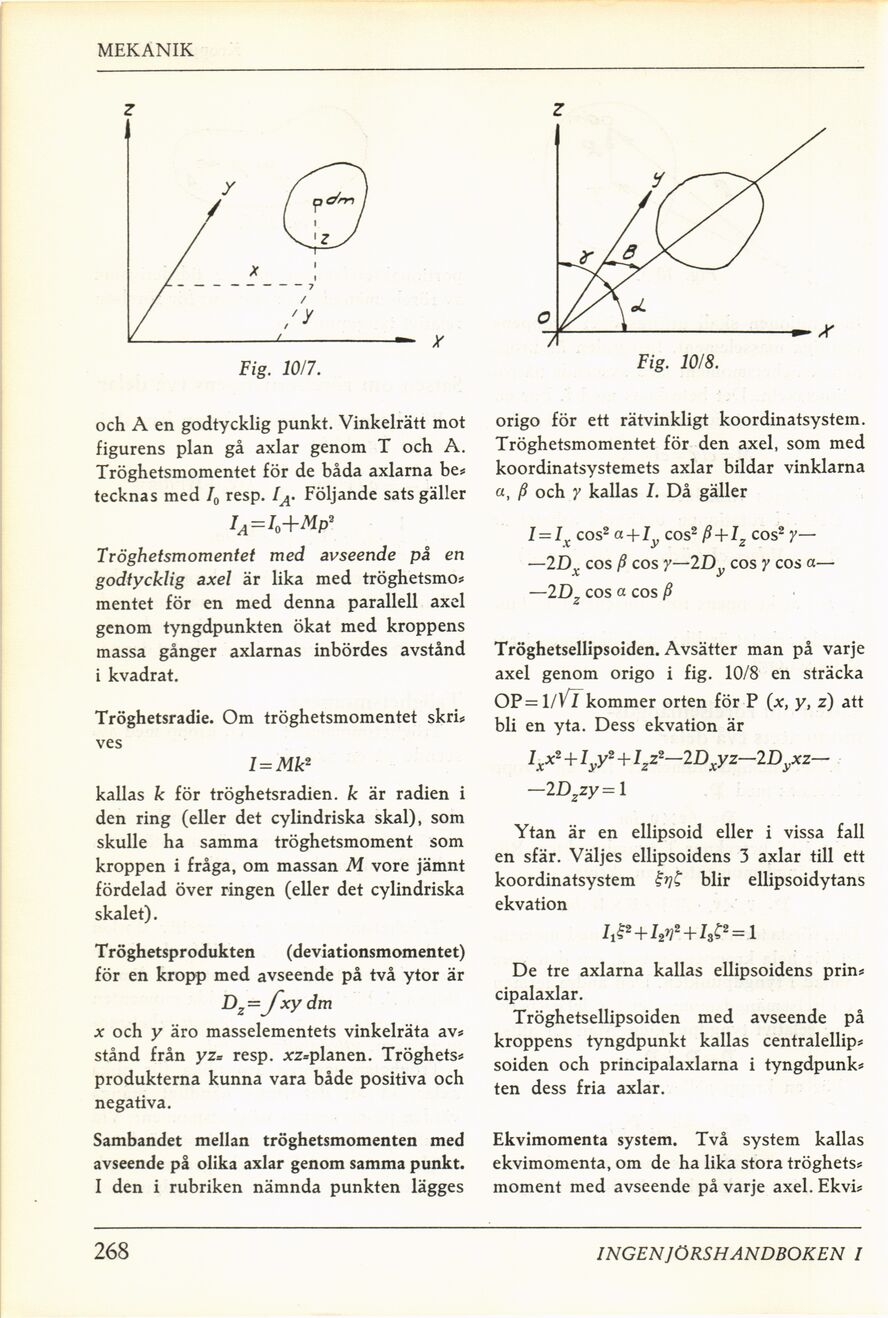
Tröghetsellipsoiden. Avsätter man på varje
axel genom origo i fig. 10/8 en sträcka
OP= 1/VT kommer orten för P (x, y, z) att
bli en yta. Dess ekvation är
Ixx2 + Iyy2+lzz2-2Dxyz—2Dyxz—
-2Dzzy=l
Ytan är en ellipsoid eller i vissa fall
en sfär. Väljes ellipsoidens 3 axlar till ett
koordinatsystem |fyf blir ellipsoidytans
ekvation
De tre axlarna kallas ellipsoidens prin*
cipalaxlar.
Tröghetsellipsoiden med avseende på
kroppens tyngdpunkt kallas centralellip*
soiden och principalaxlarna i tyngdpunk*
ten dess fria axlar.
Ekvimomenta system. Två system kallas
ekvimomenta, om de ha lika stora tröghets*
moment med avseende på varje axel. Ekvi*
268
INGENJÖRSHANDBOKEN I
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}