
Full resolution (JPEG) - On this page / på denna sida - Häfte 1. 7 jan. 1928 - Komplex vektorräkning vid vissa slag av maskintekniska problem, av civilingenjör Fredrik Dahlgren
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
18
TEKNISK TIDSKRIFT
4 FEBR. 1928
ofta, att av tvenne axelkopplade maskiner den enas rotor
utför en positiv rotation samtidigt som den andras rör sig
i negativ riktning, men detta försvårar ej på något sätt
ekvationernas uppställande och behandling. Man har blott
att på logiskt sätt beräkna uttrycken för de respektive
rotorlindningarnas rotationsfaktorer, hänförda till de
definierade rotationsriktningarna.
För ett på detta sätt ordnat system erhålla vi alltså
grundekvationerna:
I V
B= C-2
(J
V— IZ - Zm2
’ U’ . B
u I!
(7)
(8)
Ekv. (7) gäller härvid pr maskin. Ekv. (8) gäller för en
strömkrets från en godtycklig yttre punkt till en nollpunkt.
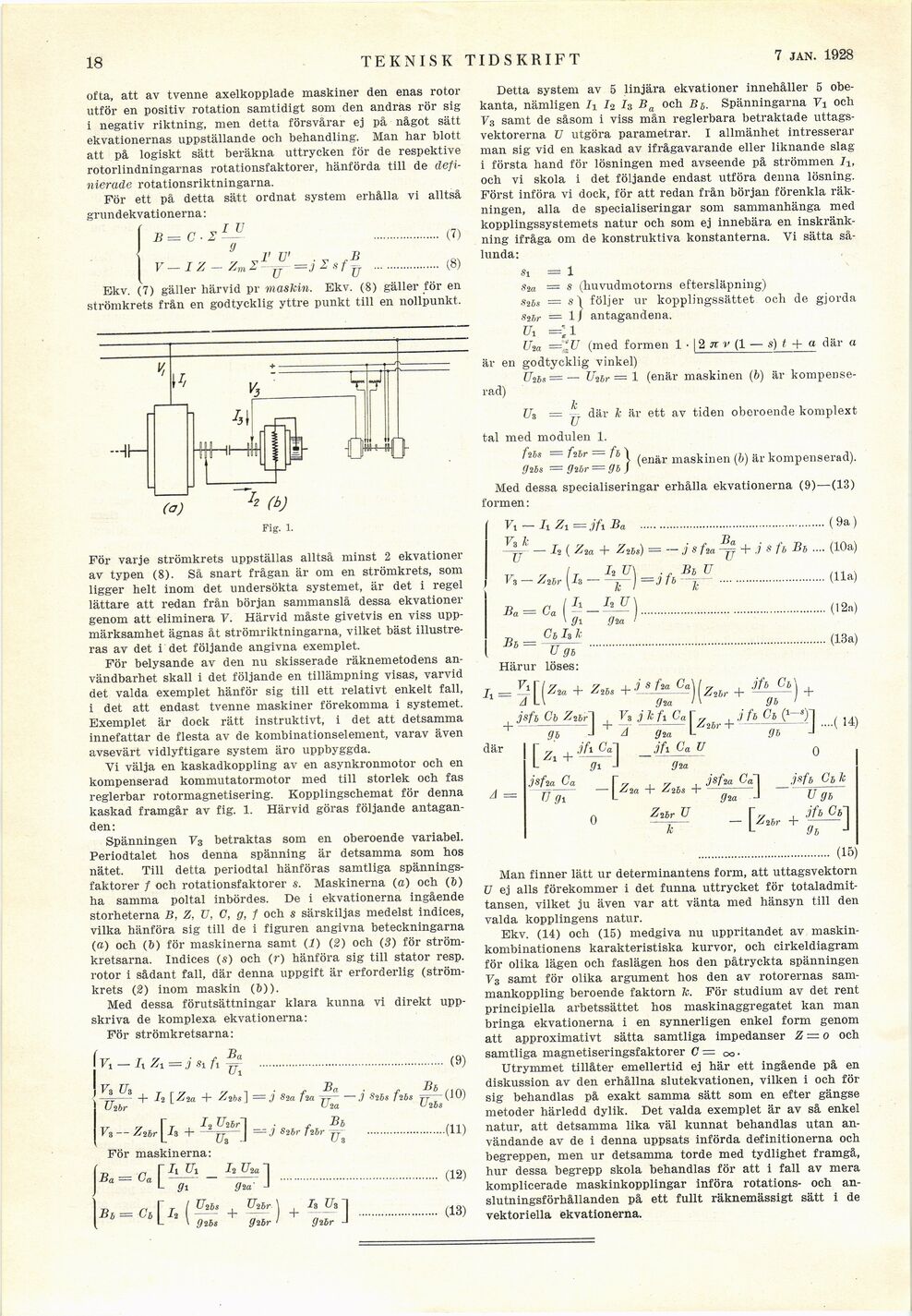
Fig. 1.
För varje strömkrets uppställas alltså minst 2 ekvationer
av typen (8). Så snart frågan är om en strömkrets, som
ligger helt inom det undersökta systemet, är det i regel
lättare att redan från början sammanslå dessa ekvationer
genom att eliminera V. Härvid måste givetvis en viss
uppmärksamhet ägnas åt strömriktningarna, vilket bäst
illustreras av det i det följande angivna exemplet.
För belysande av den nu skisserade räknemetodens
användbarhet skall i det följande en tillämpning visas, varvid
det valda exemplet hänför sig till ett relativt enkelt fall,
i det att endast tvenne maskiner förekomma i systemet.
Exemplet är dock rätt instruktivt, i det att detsamma
innefattar de flesta av de kombinationselement, varav även
avsevärt vidlyftigare system äro uppbyggda.
Vi välja en kaskadkoppling av en asynkronmotor och en
kompenserad kommutatormotor med till storlek och fas
reglerbar rotormagnetisering. Kopplingschemat för denna
kaskad framgår av fig. 1. Härvid göras följande
antaganden:
Spänningen y3 betraktas som en oberoende variabel.
Periodtalet hos denna spänning är detsamma som hos
nätet. Till detta periodtal hänföras samtliga
spänningsfaktorer / och rotationsfaktorer s. Maskinerna (o) och (B)
ha samma poltal inbördes. De i ekvationerna ingående
storheterna B, Z, ü, C, g, † och s särskiljas medelst indices,
vilka hänföra sig till de i figuren angivna beteckningarna
(a) och (b) för maskinerna samt (i) (2) och (3) för
strömkretsarna. Indices (s) och (r) hänföra sig till stator resp.
rotor i sådant fall, där denna uppgift är erforderlig
(strömkrets (B) inom maskin (b)).
Med dessa förutsättningar klara kunna vi direkt
uppskriva de komplexa ekvationerna:
För strömkretsarna:
(v1-ilz1 =
S Ba
J H fi Wi
(9)
I V3 t/3 . . B a . . B i
Utbr ü2–S2bS Wi
r, [r , h Urtrl . , B i
ZtBr\J-s –[/j~J S26r ’25r Tf
U,
För maskinerna:
.....................
J L gi g2a- J
u=<?»[* ■(— + —) +tt-1
L \ Oiis Qlbr ’ aar -I
..(11)
(12)
(13)
Detta system av 5 linjära ekvationer innehåller 5
obekanta, nämligen 7i I2 Is Ba och Bj. Spänningarna Vi och
Ys samt de såsom i viss mån reglerbara betraktade
uttagsvektorerna ü utgöra parametrar. I allmänhet intresserar
man sig vid en kaskad av ifrågavarande eller liknande slag
i första hand för lösningen med avseende på strömmen 1%,
och vi skola i det följande endast utföra denna lösning.
Först införa vi dock, för att redan från början förenkla
räkningen, alla de specialiseringar som sammanhänga med
kopplingssystemets natur och som ej innebära en
inskränkning ifråga om de konstruktiva konstanterna. Vi sätta
sålunda:
«1 = 1
s2a = s (huvudmotorns eftersläpning)
S2bs = följer ur kopplingssättet och de gjorda
s2sr = 1/ antagandena.
ui =;i
Uta —ZU (med formen 1 • | 2 n v (1 — s) t + a där a
är en godtycklig vinkel)
rad)
Uns = — V-ihr — 1 (enär maskinen (6) är kompense-
ra
U
där k är ett av tiden oberoende komplext
tal med modulen 1.
fths = fvhr — fi
g*is = gar = gi
Med dessa specialiseringar erhålla ekvationerna (9)—(13)
formen:
I (enä
enär maskinen (b) är kompenserad).
= jfi B a
(9a)
Vt - h Z,
Va k Ba
- Jj — It ( Z2a + Zvbs) = —j s fia -jj + j s fb Bl, .... (10a)
V3..-Znr[h-Ll,JJ)^jhlh,V ...............................(Ila)
-Ba = Ca ( - 1
B—P*™
k
h h U
Ugt .............
Härur löses:
J, — -j[[Zia + +
, jsft Cb ZsSrJ +
(12a)
(13a)
gia
9b
L <78 J 1 ’
där
A =
9b
A
g™
3 fi Ca U
U + ;/ir"| -
L 91 J gia
jsfia Gg
TJgx
[y , „ , jsfüa Ga I
— I Aia + A lbs i––I
L gia J
-b
Zibr U
Z2tr +
0
jsfö Gr k
Ugb
jfi C ti
9b J
........................................ (15)
Man finner lätt ur determinantens form, att uttagsvektorn
V ej alls förekommer i det funna uttrycket för
totaladmit-tansen, vilket ju även var att vänta med hänsyn till den
valda kopplingens natur.
Ekv. (14) och (15) medgiva nu uppritandet av
maskinkombinationens karakteristiska kurvor, och cirkeldiagram
för olika lägen och faslägen hos den påtryckta spänningen
T’3 samt för olika argument hos den av rotorernas
sammankoppling beroende faktorn fc. För studium av det rent
principiella arbetssättet hos maskinaggregatet kan man
bringa ekvationerna i en synnerligen enkel form genom
att approximativt sätta samtliga impedanser Z — o och
samtliga magnetiseringsfaktorer C — 00 ■
Utrymmet tillåter emellertid ej här ett ingående på en
diskussion av den erhållna slutekvationen, vilken i och för
sig behandlas på exakt samma sätt som en efter gängse
metoder härledd dylik. Det valda exemplet är av så enkel
natur, att detsamma lika väl kunnat behandlas utan
användande av de i denna uppsats införda definitionerna och
begreppen, men ur detsamma torde med tydlighet framgå,
hur dessa begrepp skola behandlas för att i fall av mera
komplicerade maskinkopplingar införa rotations- och
anslutningsförhållanden på ett fullt räknemässigt sätt i de
vektoriella ekvationerna.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}