
Full resolution (JPEG) - On this page / på denna sida - Häfte 3. 16 jan. 1943 - Metoder för snabbreglering i kraft- och industrianläggningar, av Aage Garde
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
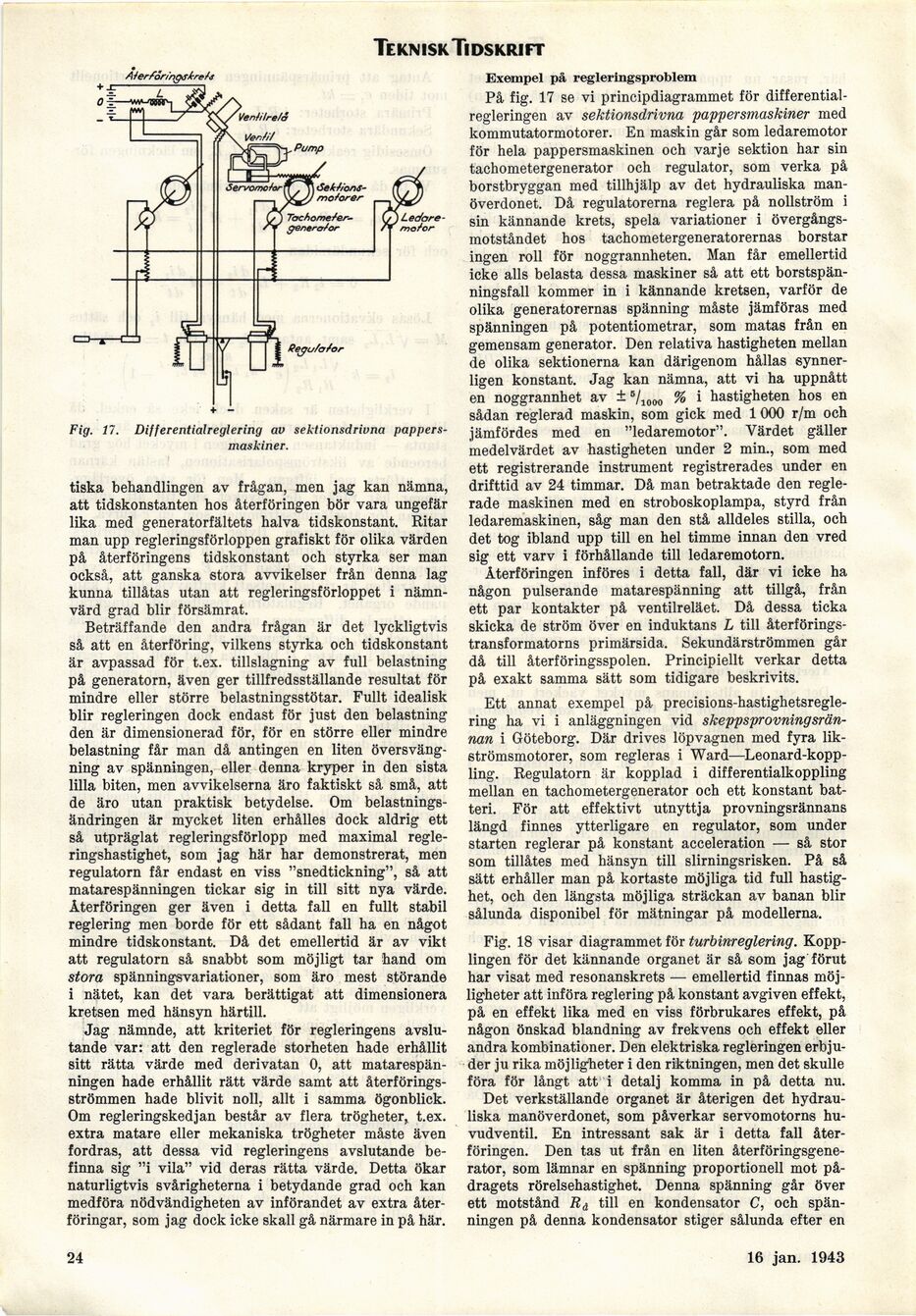
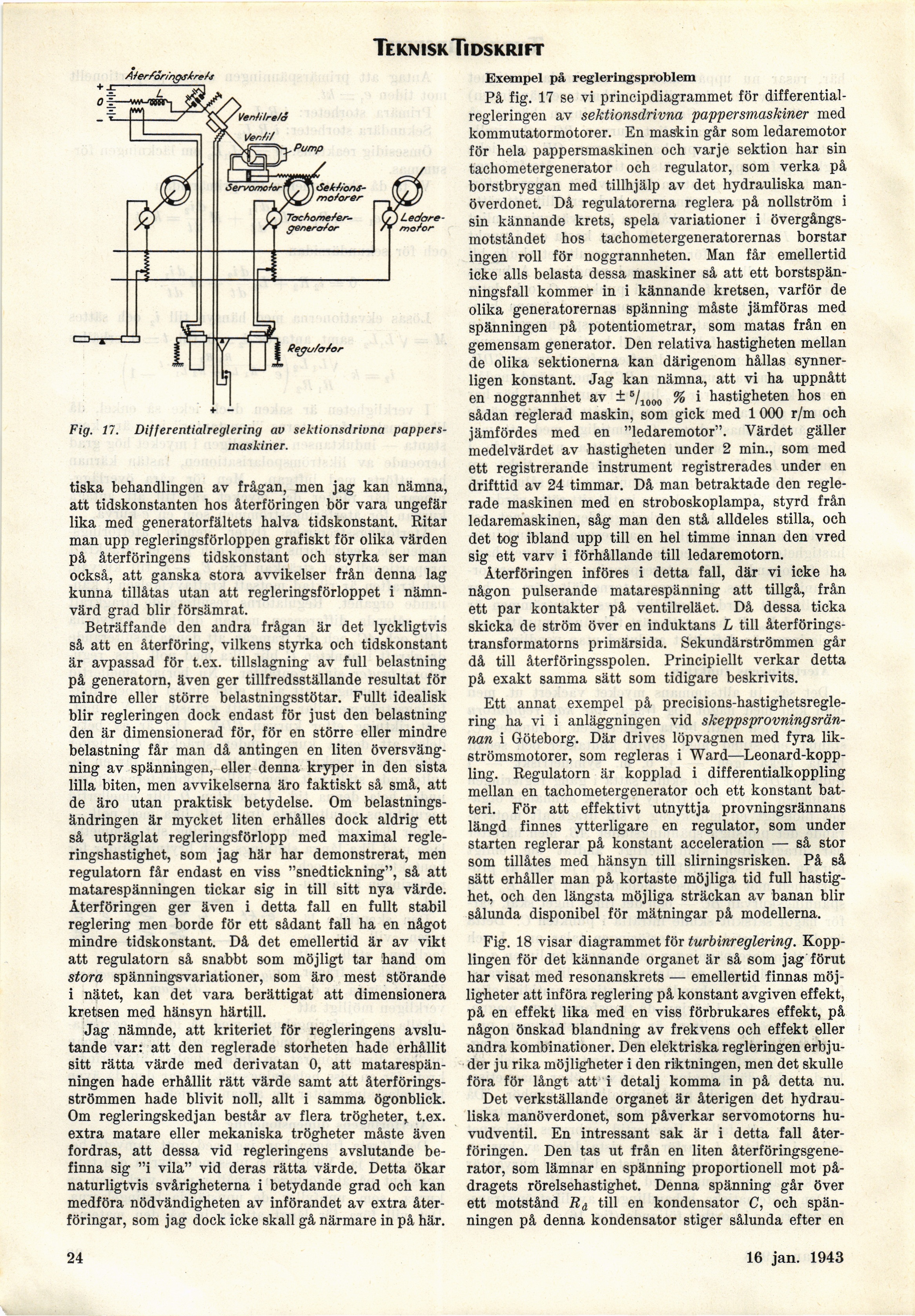
Fig. 17. Differentialreglering av sektionsdrivna
pappersmaskiner.
tiska behandlingen av frågan, men jag kan nämna,
att tidskonstanten hos återföringen bör vara ungefär
lika med generatorfältets halva tidskonstant. Ritar
man upp regleringsförloppen grafiskt för olika värden
på återföringens tidskonstant och styrka ser man
också, att ganska stora avvikelser från denna lag
kunna tillåtas utan att regleringsförloppet i
nämnvärd grad blir försämrat.
Beträffande den andra frågan är det lyckligtvis
så att en återföring, vilkens styrka och tidskonstant
är avpassad för t.ex. tillslagning av full belastning
på generatorn, även ger tillfredsställande resultat för
mindre eller större belastningsstötar. Fullt idealisk
blir regleringen dock endast för just den belastning
den är dimensionerad för, för en större eller mindre
belastning får man då antingen en liten
översvängning av spänningen, eller denna kryper in den sista
lilla biten, men avvikelserna äro faktiskt så små, att
de äro utan praktisk betydelse. Om
belastningsändringen är mycket liten erhålles dock aldrig ett
så utpräglat regleringsförlopp med maximal
regleringshastighet, som jag här har demonstrerat, men
regulatorn får endast en viss "snedtickning", så att
matarespänningen tickar sig in till sitt nya värde.
Återföringen ger även i detta fall en fullt stabil
reglering men borde för ett sådant fall ha en något
mindre tidskonstant. Då det emellertid är av vikt
att regulatorn så snabbt som möjligt tar hand om
stora spänningsvariationer, som äro mest störande
i nätet, kan det vara berättigat att dimensionera
kretsen med hänsyn härtill.
Jag nämnde, att kriteriet för regleringens
avslutande var: att den reglerade storheten hade erhållit
sitt rätta värde med derivatan 0, att
matarespänningen hade erhållit rätt värde samt att
återförings-strömmen hade blivit noll, allt i samma ögonblick.
Om regleringskedjan består av flera trögheter, t.ex.
extra matare eller mekaniska trögheter måste även
fordras, att dessa vid regleringens avslutande
befinna sig "i vila" vid deras rätta värde. Detta ökar
naturligtvis svårigheterna i betydande grad och kan
medföra nödvändigheten av införandet av extra
åter-föringar, som jag dock icke skall gå närmare in på här.
Exempel på regleringsproblem
På fig. 17 se vi principdiagrammet för
differentialregleringen av sektionsdrivna pappersmaskiner med
kommutatormotorer. En maskin går som ledaremotor
för hela pappersmaskinen och varje sektion har sin
tachometergenerator och regulator, som verka på
borstbryggan med tillhjälp av det hydrauliska
manöverdonet. Då regulatorerna reglera på nollström i
sin kännande krets, spela variationer i
övergångsmotståndet hos tachometergeneratorernas borstar
ingen roll för noggrannheten. Man får emellertid
icke alls belasta dessa maskiner så att ett
borstspänningsfall kommer in i kännande kretsen, varför de
olika generatorernas spänning måste jämföras med
spänningen på potentiometrar, som matas från en
gemensam generator. Den relativa hastigheten mellan
de olika sektionerna kan därigenom hållas
synnerligen konstant. Jag kan nämna, att vi ha uppnått
en noggrannhet av ± 5/1000 % i hastigheten hos en
sådan reglerad maskin, som gick med 1 000 r/m och
jämfördes med en "ledaremotor". Värdet gäller
medelvärdet av hastigheten under 2 min., som med
ett registrerande instrument registrerades under en
drifttid av 24 timmar. Då man betraktade den
reglerade maskinen med en stroboskoplampa, styrd från
ledaremaskinen, såg man den stå alldeles stilla, och
det tog ibland upp till en hel timme innan den vred
sig ett varv i förhållande till ledaremotorn.
Återföringen införes i detta fall, där vi icke ha
någon pulserande matarespänning att tillgå, från
ett par kontakter på ventilreläet. Då dessa ticka
skicka de ström över en induktans L till
återförings-transformatorns primärsida. Sekundärströmmen går
då till återföringsspolen. Principiellt verkar detta
på exakt samma sätt som tidigare beskrivits.
Ett annat exempel på
precisions-hastighetsreglering ha vi i anläggningen vid skeppsprovning
srän-nan i Göteborg. Där drives löpvagnen med fyra
likströmsmotorer, som regleras i
Ward—Leonard-koppling. Regulatorn är kopplad i differentialkoppling
mellan en tachometergenerator och ett konstant
batteri. För att effektivt utnyttja provningsrännans
längd finnes ytterligare en regulator, som under
starten reglerar på konstant acceleration — så stor
som tillåtes med hänsyn till slirningsrisken. På så
sätt erhåller man på kortaste möjliga tid full
hastighet, och den längsta möjliga sträckan av banan blir
sålunda disponibel för mätningar på modellerna.
Fig. 18 visar diagrammet för turbinreglering.
Kopplingen för det kännande organet är så som jag förut
har visat med resonanskrets — emellertid finnas
möjligheter att införa reglering på konstant avgiven effekt,
på en effekt lika med en viss förbrukares effekt, på
någon önskad blandning av frekvens och effekt eller
andra kombinationer. Den elektriska regleringen
erbjuder ju rika möjligbeter i den riktningen, men det skulle
föra för långt att i detalj komma in på detta nu.
Det verkställande organet är återigen det
hydrauliska manöverdonet, som påverkar servomotorns
huvudventil. En intressant sak är i detta fall
återföringen. Den tas ut från en liten
återföringsgene-rator, som lämnar en spänning proportionell mot
på-dragets rörelsehastighet. Denna spänning går över
ett motstånd Rå till en kondensator C, och
spänningen på denna kondensator stiger sålunda efter en
24
30 jan. 1943
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}