
Full resolution (JPEG) - On this page / på denna sida - H. 11. 13 mars 1948 - Servostyrningar, av Laszlo von Hámos

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
12(5
TEKNISK TIDSKRIFT
Olika slags reläer måste även räknas till de
elektriska servoförstärkarna. De kommer till
användning vid de enkla "till och från"-styrningarna
eller vid oscillerande styrning8.
Kontinuerlig styrning av elektriska motorer
Slutsteget i en servoförstärkarkedja utgöres ofta
av en elektrisk motor. Som redan nämnts styres
en sådan enklast med reläer, vilka verkställa
omkoppling för växlande körriktningar. Detta
arbetssätt är dock icke godtagbart för högvärdiga
servosystem. Man eftersträvar i stället
kontinuerlig styrning, varvid motorns vridmoment skall
kunna varieras såväl beträffande riktning som
styrka. Talrika kopplingar finnes numera för
detta ändamål1. Ett exempel har anförts i fig. 5.
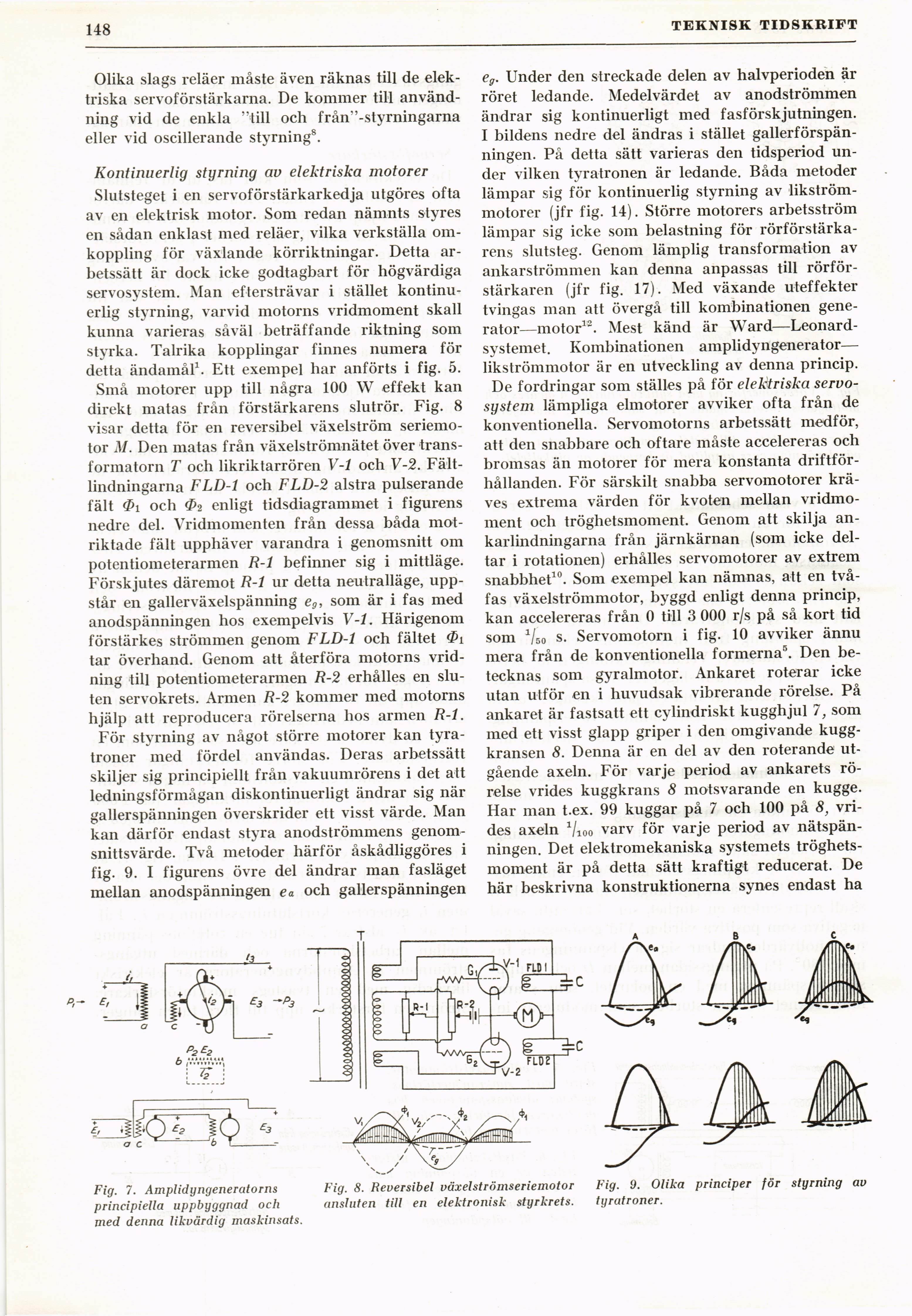
Små motorer upp till några 100 W effekt kan
direkt matas från förstärkarens slutrör. Fig. 8
visar detta för en reversibel växelström
seriemotor M. Den matas från växelströmnätet över
transformatorn T och likriktarrören V-l och V-2.
Fältlindningarna FLD-1 och FLD-2 alstra pulserande
fält och <E>2 enligt tidsdiagrammet i figurens
nedre del. Vridmomenten från dessa båda
mot-riktade fält upphäver varandra i genomsnitt om
potentiometerarmen R-l befinner sig i mittläge.
Förskjutes däremot R-l ur detta neutralläge,
uppstår en gallerväxelspänning eg, som är i fas med
anodspänningen hos exempelvis V-l. Härigenom
förstärkes strömmen genom FLD-1 och fältet
tar överhand. Genom att återföra motorns
vridning till potentiometerarmen R-2 erhålles en
sluten servokrets. Armen R-2 kommer med motorns
hjälp att reproducera rörelserna hos armen R-l.
För styrning av något större motorer kan
tyra-troner med fördel användas. Deras arbetssätt
skiljer sig principiellt från vakuumrörens i det att
ledningsförmågan diskontinuerligt ändrar sig när
gallerspänningen överskrider ett visst värde. Man
kan därför endast styra anodströmmens
genomsnittsvärde. Två metoder härför åskådliggöres i
fig. 9. I figurens övre del ändrar man fasläget
mellan anodspänningen ea och gallerspänningen
eg. Under den streckade delen av halvperioden är
röret ledande. Medelvärdet av anodströmmen
ändrar sig kontinuerligt ined fasförskjutningen.
I bildens nedre del ändras i stället
gallerförspänningen. På detta sätt varieras den tidsperiod
under vilken tyratronen är ledande. Båda metoder
lämpar sig för kontinuerlig styrning av
likströmmotorer (jfr fig. 14). Större motorers arbetsström
lämpar sig icke som belastning för
rörförstärkarens slutsteg. Genom lämplig transformation av
ankarströmmen kan denna anpassas till
rörförstärkaren (jfr fig. 17). Med växande uteffekter
tvingas man att övergå till kombinationen
generator—motor12. Mest känd är
Ward—Leonard-systemet. Kombinationen amplidyngenerator—
likströmmotor är en utveckling av denna princip.
De fordringar som ställes på för elektriska
servosystem lämpliga elmotorer avviker ofta från de
konventionella. Servomotorns arbetssätt medför,
att den snabbare och oftare måste accelereras och
bromsas än motorer för mera konstanta
driftförhållanden. För särskilt snabba servomotorer
kräves extrema värden för kvoten mellan
vridmoment och tröghetsmoment. Genom att skilja
an-karlindningarna från järnkärnan (som icke
deltar i rotationen) erhålles servomotorer av extrem
snabbhet10. Som exempel kan nämnas, att en
tvåfas växelströmmotor, byggd enligt denna princip,
kan accelereras från 0 till 3 000 r/s på så kort tid
som Vso s. Servomotorn i fig. 10 avviker ännu
mera från de konventionella formerna5. Den
betecknas som gyralmotor. Ankaret roterar icke
utan utför en i huvudsak vibrerande rörelse. På
ankaret är fastsatt ett cylindriskt kugghjul 7, som
med ett visst glapp griper i den omgivande
kugg-kransen 8. Denna är en del av den roterande
utgående axeln. För varje period av ankarets
rörelse vrides kuggkrans 8 motsvarande en kugge.
Har man t.ex. 99 kuggar på 7 och 100 på 8,
vrides axeln 1/i00 varv för varje period av
nätspänningen. Det elektromekaniska systemets
tröghetsmoment är på detta sätt kraftigt reducerat. De
här beskrivna konstruktionerna synes endast ha
Fig. 7. Amplidyngeneratoms
principiella uppbyggnad och
med denna likvärdig maskinsats.
Fig. 8. Reversibel växelströmseriemotor
ansluten till en elektronisk styrkrets.
Fig. 9. Olika principer för styrning av
tyratroner.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}