
Full resolution (JPEG) - On this page / på denna sida - H. 11. 13 mars 1948 - Servostyrningar, av Laszlo von Hámos
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
13 mars 1948
149
Fig. 10. Gyralmotor; motorns inre del utför en svängande
rörelse, varvid utgående axeln försättes i rotation.
betydelse för mindre motorer (upp till ca 1U0 W).
Elmotorer lämpar sig icke tör snabba servodrifter
med stor uteffekt. Deras tröghetsmoment blir
nämligen förhållandevis stort. Man arbetar då i
stället med variabla hydrauliska växlar, vilka
drives av en elmotor med konstant varvtal8.
Ingångselementet till ett hydrauliskt system är
vanligtvis en ventil, som förvandlar en mekanisk
rörelse till variationer i mediets tryck eller
strömningshastighet. Det är betydelsefullt att avlasta
ingångsventilen så mycket som möjligt.
Hydrauliska systemets slutsteg kan bestå av en
arbets-kolv av den art, som redan omtalats i
samband med fig. 2. Önskas rotationsrörelse, så
användes hydrauliska motorer, t.ex. Imo-motor.
Varvtalet hos dessa är proportionellt mot den
vätskemängd som pumpas genom per tidsenhet.
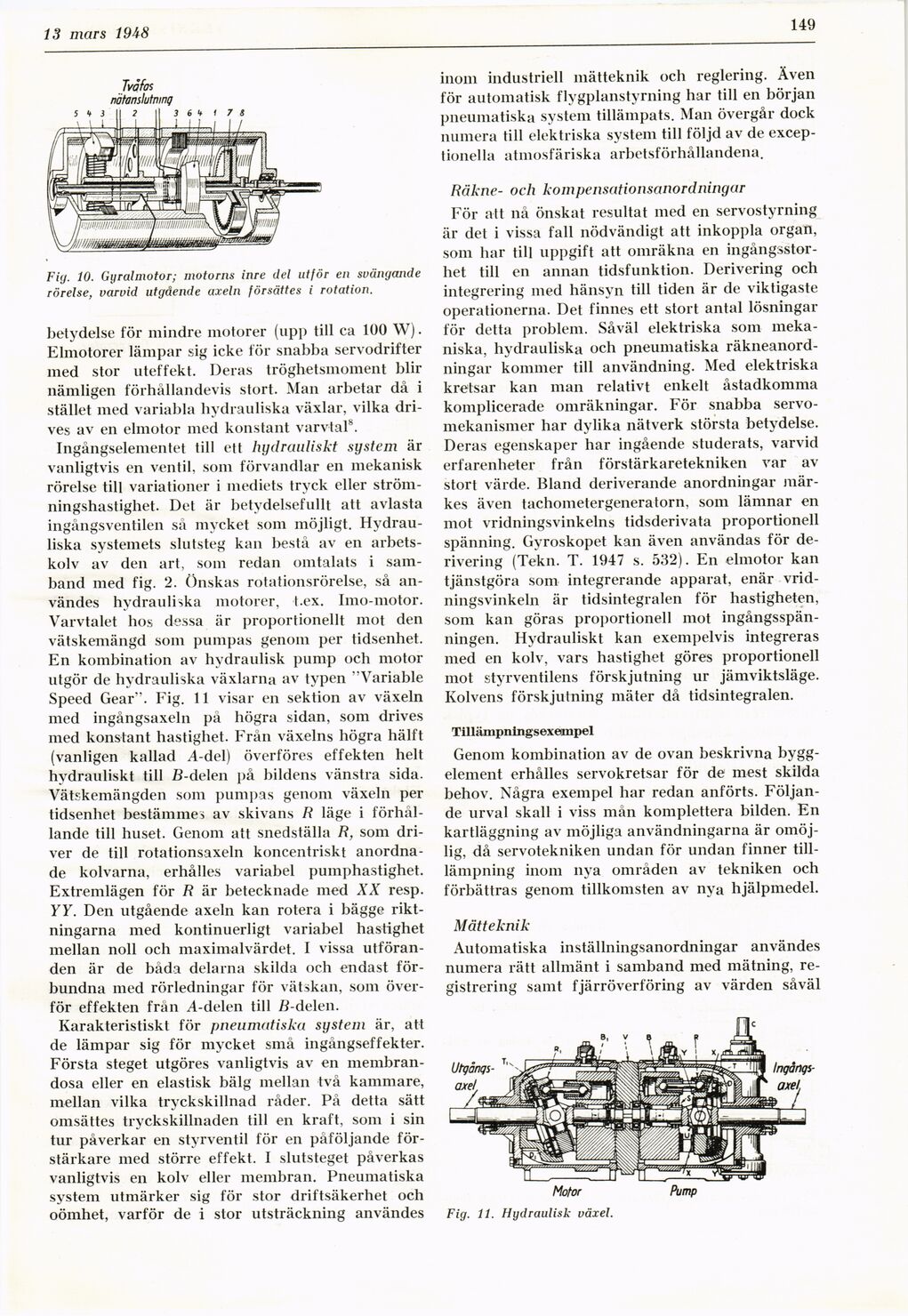
En kombination av hydraulisk pump och motor
utgör de hydrauliska växlarna av typen "Variable
Speed Gear’’. Fig. 11 visar en sektion av växeln
med ingångsaxeln på högra sidan, som drives
med konstant hastighet. Från växelns högra hälft
(vanligen kallad A-del) överföres effekten helt
hydrauliskt till ß-delen på bildens vänstra sida.
Vätskemängden som pumpas genom växeln per
tidsenhet bestämmes av skivans R läge i
förhallande till huset. Genom att snedställa R, som
driver de till rotationsaxeln koncentriskt
anordnade kolvarna, erhålles variabel pumphastighet.
Extremlägen för R är betecknade med XX resp.
YY. Den utgående axeln kan rotera i bägge
riktningarna med kontinuerligt variabel hastighet
mellan noll och maximalvärdet. I vissa
utföranden är de båda delarna skilda och endast
förbundna med rörledningar för vätskan, som
överför effekten från A-delen till fl-delen.
Karakteristiskt för pneumatiska system är, att
de lämpar sig för mycket små ingångseffekter.
Första steget utgöres vanligtvis av en
membrandosa eller en elastisk bälg mellan två kammare,
mellan vilka tryckskillnad råder. På detta sätt
omsättes tryckskillnaden till en kraft, som i sin
tur påverkar en styrventil för en påföljande
förstärkare med större effekt. I slutsteget påverkas
vanligtvis en kolv eller membran. Pneumatiska
system utmärker sig för stor driftsäkerhet och
oömhet, varför de i stor utsträckning användes
inom industriell mätteknik och reglering. Även
för automatisk flygplanstyrning har till en början
pneumatiska system tillämpats. Man övergår dock
numera till elektriska system till följd av de
exceptionella atmosfäriska arbetsförhållandena.
Räkne- och kompensationsanordningar
För att nå önskat resultat med en servostyrning
är det i vissa fall nödvändigt att inkoppla organ,
som har till uppgift att omräkna en
ingångsstor-het till en annan tidsfunktion. Derivering och
integrering med hänsyn till tiden är de viktigaste
operationerna. Det finnes ett stort antal lösningar
för detta problem. Såväl elektriska som
mekaniska, hydrauliska och pneumatiska
räkneanord-ningar kommer till användning. Med elektriska
kretsar kan man relativt enkelt åstadkomma
komplicerade omräkningar. För snabba
servo-mekanismer har dylika nätverk största betydelse.
Deras egenskaper har ingående studerats, varvid
erfarenheter från förstärkaretekniken var av
stort värde. Bland deriverande anordningar
märkes även tachometergeneratorn, som lämnar en
mot vridningsvinkelns tidsderivata proportionell
spänning. Gyroskopet kan även användas för
derivering (Tekn. T. 1947 s. 532). En elmotor kan
tjänstgöra som integrerande apparat, enär
vridningsvinkeln är tidsintegralen för hastigheten,
som kan göras proportionell mot
ingångsspänningen. Hydrauliskt kan exempelvis integreras
med en kolv, vars hastighet göres proportionell
mot styrventilens förskjutning ur jämviktsläge.
Kolvens förskjutning mäter då tidsintegralen.
Tillämpningsexempel
Genom kombination av de ovan beskrivna
byggelement erhålles servokretsar för de mest skilda
behov. Några exempel har redan anförts.
Följande urval skall i viss mån komplettera bilden. En
kartläggning av möjliga användningarna är
omöjlig, då servotekniken undan för undan finner
till-lämpning inom nya områden av tekniken och
förbättras genom tillkomsten av nya hjälpmedel.
Mätteknik
Automatiska inställningsanordningar användes
numera rätt allmänt i samband med mätning,
registrering samt fjärröverföring av värden såväl
Fig. 11. Hydraulisk växel.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}