
Full resolution (JPEG) - On this page / på denna sida - 1957, H. 37 - Obalanser och balanseringsmaskiner, av Fritz Abicht och Lennart Grönskog

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
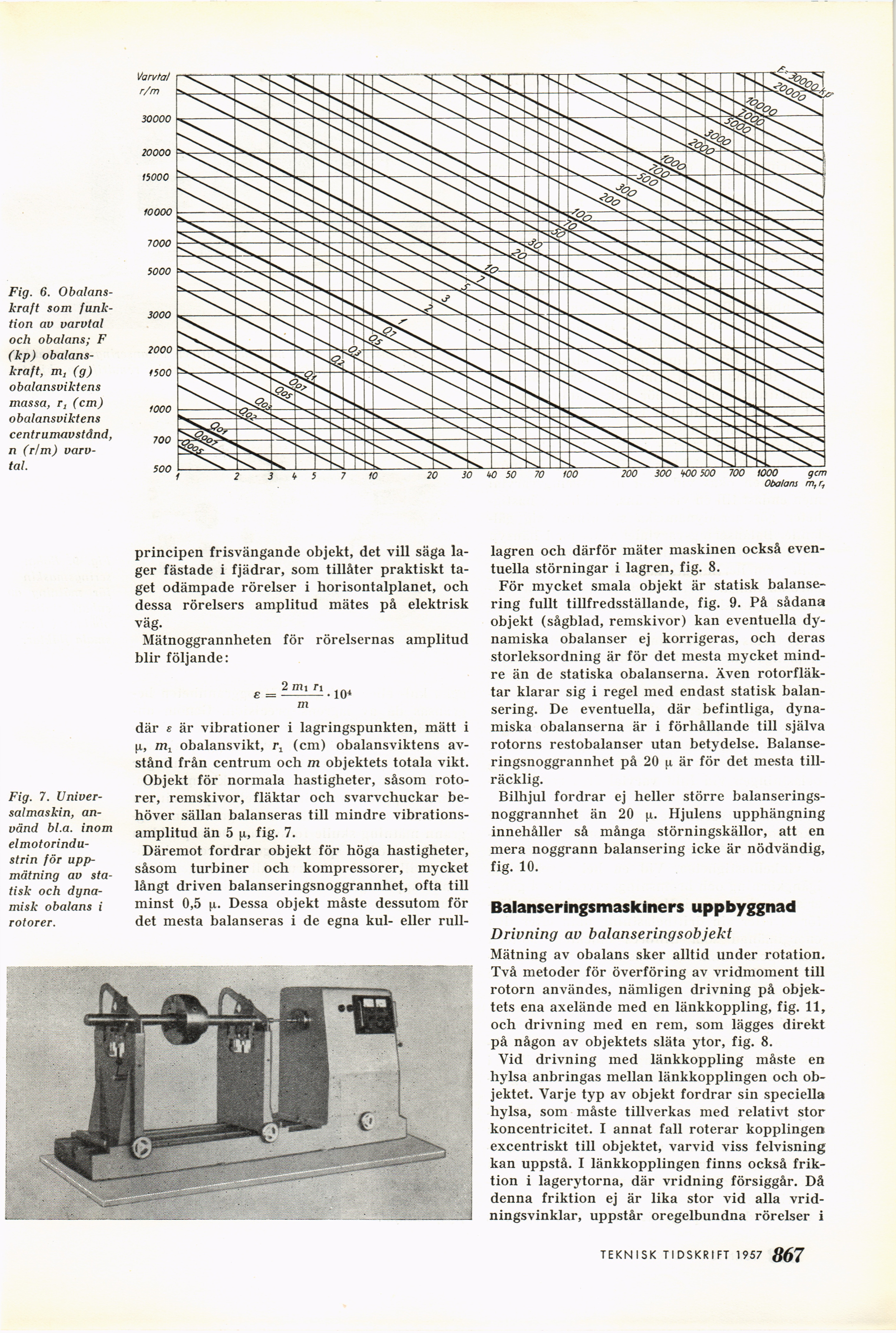
Fig. 6.
Obalanskraft som
funktion av varvtal
och obalans; F
(kp)
obalanskraft, m, (g)
obalansviktens
massa, r, (cm)
obalansviktens
centrumavstånd,
n (r/m)
varvtal.
principen frisvängande objekt, det vill säga
lager fästade i fjädrar, som tillåter praktiskt
taget odämpade rörelser i horisontalplanet, och
dessa rörelsers amplitud mätes på elektrisk
väg.
Mätnoggrannheten för rörelsernas amplitud
blir följande:
Fig. 7.
Universalmaskin, använd bl.a. inom [-elmotorindustrin-]
{+elmotorindu-
strin+} för
uppmätning av
statisk och
dynamisk obalans i
rotorer.
där e är vibrationer i lagringspunkten, mätt i
|x, m1 obalansvikt, rx (cm) obalansviktens
avstånd från centrum och m objektets totala vikt.
Objekt för normala hastigheter, såsom
rotorer, remskivor, fläktar och svarvchuckar
behöver sällan balanseras till mindre
vibrations-amplitud än 5 ji, fig. 7.
Däremot fordrar objekt för höga hastigheter,
såsom turbiner och kompressorer, mycket
långt driven balanseringsnoggrannhet, ofta till
minst 0,5 Dessa objekt måste dessutom för
det mesta balanseras i de egna kul- eller rull-
lagren och därför mäter maskinen också
eventuella störningar i lagren, fig. 8.
För mycket smala objekt är statisk
balansering fullt tillfredsställande, fig. 9. På sådana
objekt (sågblad, remskivor) kan eventuella
dynamiska obalanser ej korrigeras, och deras
storleksordning är för det mesta mycket
mindre än de statiska obalanserna. Även
rotorfläk-tar klarar sig i regel med endast statisk
balansering. De eventuella, där befintliga,
dynamiska obalanserna är i förhållande till själva
rotorns restobalanser utan betydelse.
Balanseringsnoggrannhet på 20 n är för det mesta
tillräcklig.
Bilhjul fordrar ej heller större
balanseringsnoggrannhet än 20 Hjulens upphängning
innehåller så många störningskällor, att en
mera noggrann balansering icke är nödvändig,
fig. 10.
Balanseringsmaskiners uppbyggnad
Drivning av balanseringsobjekt
Mätning av obalans sker alltid under rotation.
Två metoder för överföring av vridmoment till
rotorn användes, nämligen drivning på
objektets ena axelände med en länkkoppling, fig. 11,
och drivning med en rem, som lägges direkt
på någon av objektets släta ytor, fig. 8.
Vid drivning med länkkoppling måste en
hylsa anbringas mellan länkkopplingen och
objektet. Varje typ av objekt fordrar sin speciella
hylsa, som måste tillverkas med relativt stor
koncentricitet. I annat fall roterar kopplingen
excentriskt till objektet, varvid viss felvisning
kan uppstå. I länkkopplingen finns också
friktion i lagerytorna, där vridning försiggår. Då
denna friktion ej är lika stor vid alla
vrid-ningsvinklar, uppstår oregelbundna rörelser i
7 TEKN ISK TI DSKRI FT 1957
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}