
Full resolution (JPEG) - On this page / på denna sida - 1958, H. 15 - Luftvärn, av Lennart G Lind

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
koptrar, transport- och eldledningsplan. Ett
väsentligt krav på dessa vapen är att de skall
kunna medföras i de främsta linjerna eller
eldberedda på fordon och kunna skötas av ett
fåtal man.
Robotar
För bekämpning av mål på stora avstånd och
höjder, t.ex. atombombbärande flygplan,
räcker det inte med att öka kalibern hos det
konventionella luftvärnet. Skjuttiderna blir så
stora, att flygplanen hinner göra
undanman-övrar. Det blir då nödvändigt att även på
något sätt kunna styra projektilen i luften.
Därigenom är man inne på luftvärnsrobotarnas
område.
Hela kedjan från målupptäckt till eldgivning
överensstämmer i stort med det konventionella
luftvärnets. Man kan schematiskt tänka sig att
man bytt ut kanonerna mot startlavetter och
ammunitionen mot robotar, fig. 2. Bland kända
luftvärnsrobotsystem kan man när det gäller
att bringa roboten till träff i målet särskilja
tre principiellt skilda metoder:
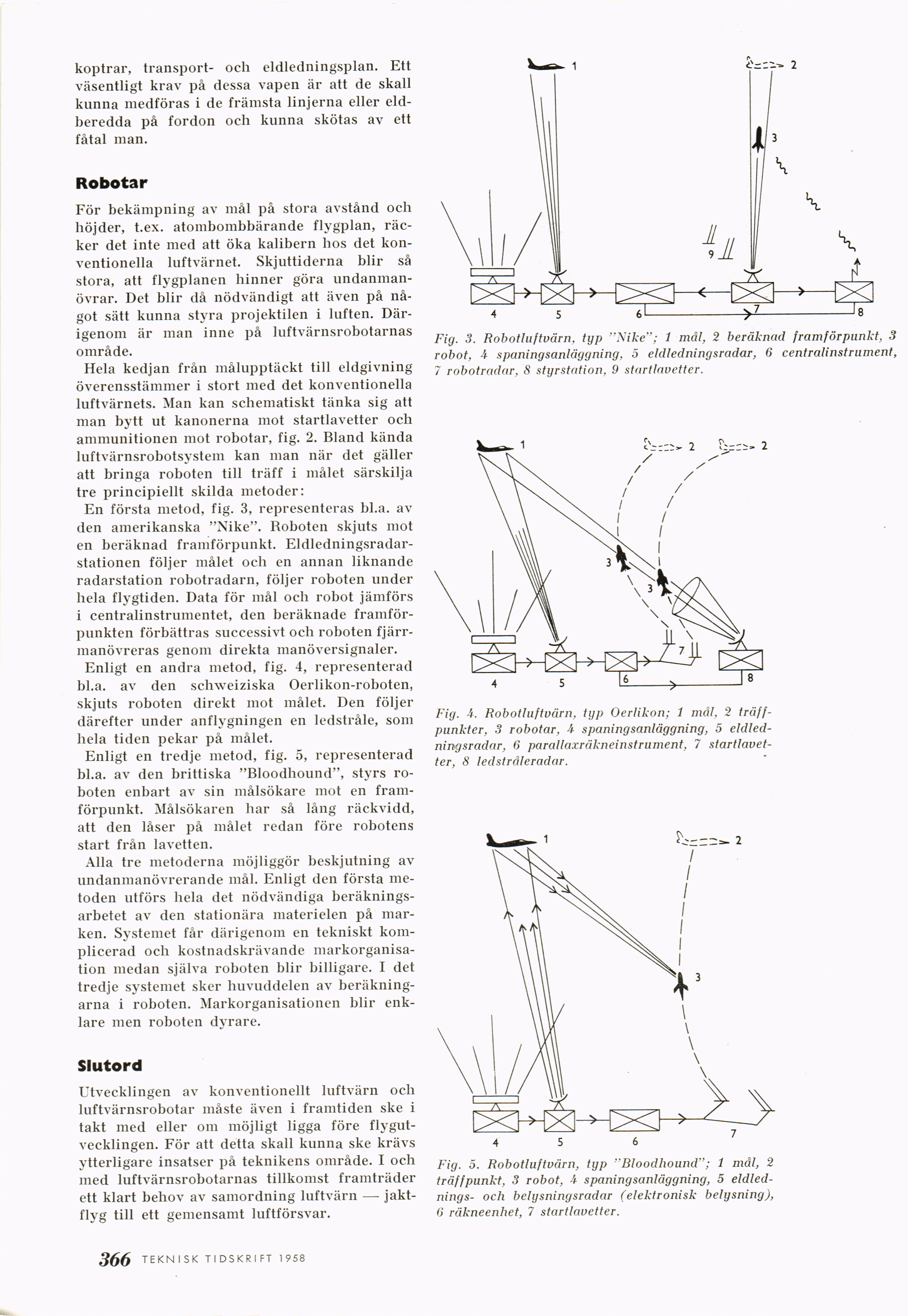
En första metod, fig. 3, representeras bl.a. av
den amerikanska "Nike". Roboten skjuts mot
en beräknad framförpunkt.
Eldledningsradar-stationen följer målet och en annan liknande
radarstation robotradarn, följer roboten under
hela flygtiden. Data för mål och robot jämförs
i centralinstrumentet, den beräknade
framförpunkten förbättras successivt och roboten
fjärr-manövreras genom direkta manöversignaler.
Enligt en andra metod, fig. 4, representerad
bl.a. av den schweiziska Oerlikon-roboten,
skjuts roboten direkt mot målet. Den följer
därefter under anflygningen en ledstråle, som
hela tiden pekar på målet.
Enligt en tredje metod, fig. 5, representerad
bl.a. av den brittiska "Bloodhound", styrs
roboten enbart av sin målsökare mot en
framförpunkt. Målsökaren har så lång räckvidd,
att den låser på målet redan före robotens
start från lavetten.
Alla tre metoderna möjliggör beskjutning av
undanmanövrerande mål. Enligt den första
metoden utförs hela det nödvändiga
beräkningsarbetet av den stationära materielen på
marken. Systemet får därigenom en tekniskt
komplicerad och kostnadskrävande
markorganisation medan själva roboten blir billigare. I det
tredje systemet sker huvuddelen av
beräkningarna i roboten. Markorganisationen blir
enklare men roboten dyrare.
Slutord
Utvecklingen av konventionellt luftvärn och
luftvärnsrobotar måste även i framtiden ske i
takt med eller om möjligt ligga före
flygutvecklingen. För att detta skall kunna ske krävs
ytterligare insatser på teknikens område. I och
med luftvärnsrobotarnas tillkomst framträder
ett klart behov av samordning luftvärn —
jaktflyg till ett gemensamt luftförsvar.
Fig. 3. Robothiftvärn, typ "Nike’’; 1 mål, 2 beräknad framförpunkt, 3
robot, i spaningsanläggning, 5 eldledningsradar, 6 centralinstrument,
1 robotradar, 8 styrstation, 9 startlavetter.
Fig. i. Robotluftvärn, typ Oerlikon; 1 mål, 2
träffpunkter, 3 robotar, 4 spaningsanläggning, 5
eldled-ningsraclar, 6 parallaxräkneinstrument, 7
startlavetter, 8 ledstråleradar.
Fig. 5. Robotluftvärn, typ "Bloodhound"; 1 mål, 2
träffpunkt, 3 robot, A spaningsanläggning, 5
eldlednings- och belysningsradar (elektronisk belysning),
6 räkneenhet, 1 startlavetter.
366 TEKN I SK T I DSKR I FT 1 958
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}