
Full resolution (JPEG) - On this page / på denna sida - 1960, H. 36 - Säkerhetsinstrumentering vid en modern robotbas, av Jan Kuno Möller

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
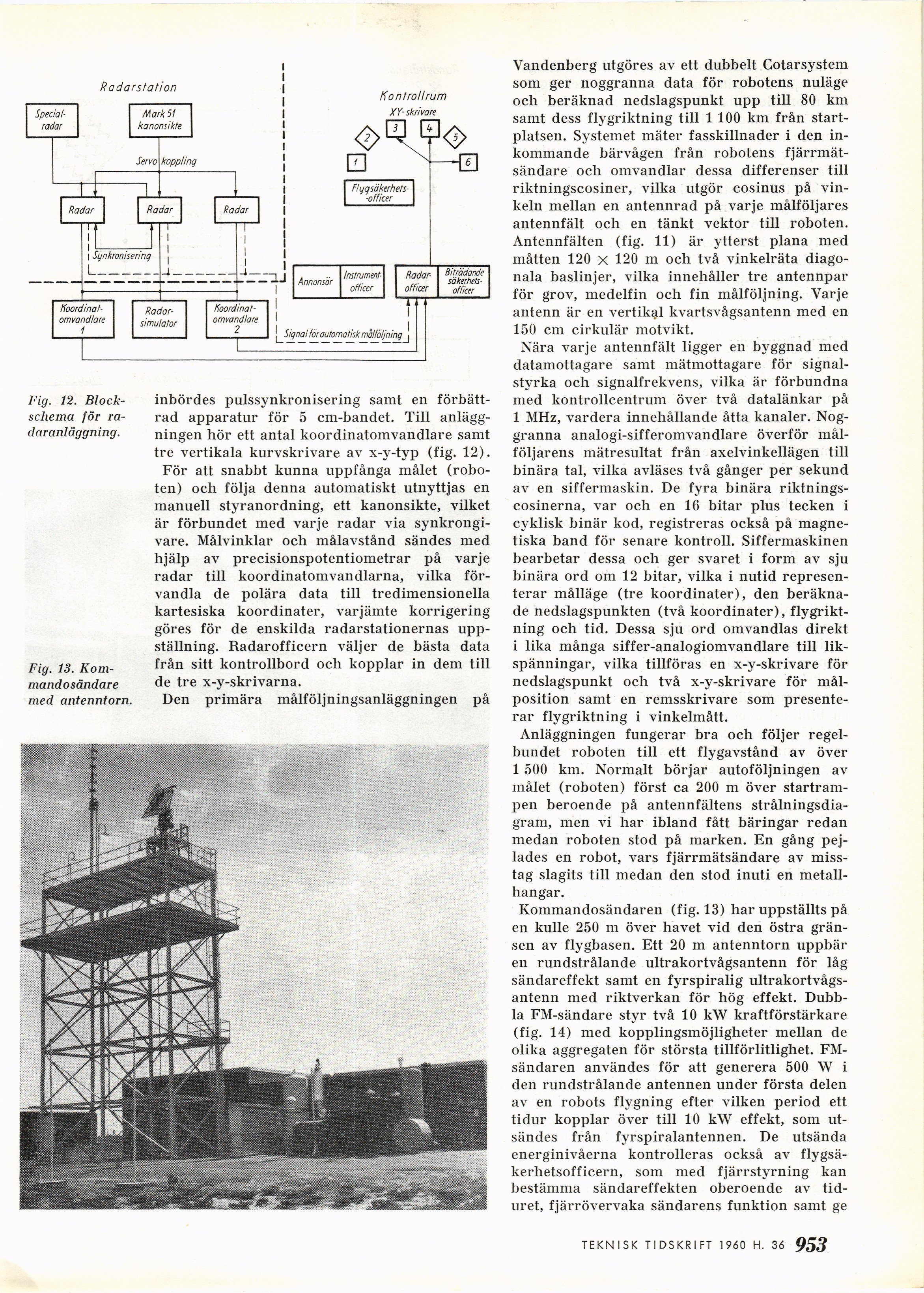
inbördes pulssynkronisering samt en
förbättrad apparatur för 5 cm-bandet. Till
anläggningen hör ett antal koordinatomvandlare samt
tre vertikala kurvskrivare av x-y-typ (fig. 12).
För att snabbt kunna uppfånga målet
(roboten) och följa denna automatiskt utnyttjas en
manuell styranordning, ett kanonsikte, vilket
är förbundet med varje radar via
synkrongivare. Målvinklar och målavstånd sändes med
hjälp av precisionspotentiometrar på varje
radar till koordinatomvandlarna, vilka
förvandla de polära data till tredimensionella
kartesiska koordinater, varjämte korrigering
göres för de enskilda radarstationernas
uppställning. Radarofficern väljer de bästa data
från sitt kontrollbord och kopplar in dem till
de tre x-y-skrivarna.
Den primära målföljningsanläggningen på
Vandenberg utgöres av ett dubbelt Cotarsystem
som ger noggranna data för robotens nuläge
och beräknad nedslagspunkt upp till 80 km
samt dess flygriktning till 1 100 km från
startplatsen. Systemet mäter fasskillnader i den
inkommande bärvågen från robotens
fjärrmät-sändare och omvandlar dessa differenser till
riktningscosiner, vilka utgör cosinus på
vinkeln mellan en antennrad på varje målföljares
antennfält och en tänkt vektor till roboten.
Antennfälten (fig. 11) är ytterst plana med
måtten 120 X 120 m och två vinkelräta
diagonala baslinjer, vilka innehåller tre antennpar
för grov, medelfin och fin målföljning. Varje
antenn är en vertikal kvartsvågsantenn med en
150 cm cirkulär motvikt.
Nära varje antennfält ligger en byggnad med
datamottagare samt mätmottagare för
signalstyrka och signalfrekvens, vilka är förbundna
med kontrollcentrum över två datalänkar på
1 MHz, vardera innehållande åtta kanaler.
Noggranna analogi-sifferomvandlare överför
mål-följarens mätresultat från axelvinkellägen till
binära tal, vilka avläses två gånger per sekund
av en siffermaskin. De fyra binära
riktningscosiner na, var och en 16 bitar pius tecken i
cyklisk binär kod, registreras också på
magnetiska band för senare kontroll. Siffermaskinen
bearbetar dessa och ger svaret i form av sju
binära ord om 12 bitar, vilka i nutid
representerar målläge (tre koordinater), den
beräknade nedslagspunkten (två koordinater),
flygriktning och tid. Dessa sju ord omvandlas direkt
i lika många siffer-analogiomvandlare till
likspänningar, vilka tillföras en x-y-skrivare för
nedslagspunkt och två x-y-skrivare för
målposition samt en remsskrivare som
presenterar flygriktning i vinkelmått.
Anläggningen fungerar bra och följer
regelbundet roboten till ett flygavstånd av över
1 500 km. Normalt börjar autoföljningen av
målet (roboten) först ca 200 m över
startrampen beroende på antennfältens
strålningsdiagram, men vi har ibland fått bäringar redan
medan roboten stod på marken. En gång
pejlades en robot, vars fjärrmätsändare av
misstag slagits till medan den stod inuti en
metallhangar.
Kommandosändaren (fig. 13) har uppställts på
en kulle 250 m över havet vid den östra
gränsen av flygbasen. Ett 20 m antenntorn uppbär
en rundstrålande ultrakortvågsantenn för låg
sändareffekt samt en fyrspiralig
ultrakortvågsantenn med riktverkan för hög effekt.
Dubbla FM-sändare styr två 10 kW kraftförstärkare
(fig. 14) med kopplingsmöjligheter mellan de
olika aggregaten för största tillförlitlighet.
FM-sändaren användes för att generera 500 W i
den rundstrålande antennen under första delen
av en robots flygning efter vilken period ett
tidur kopplar över till 10 kW effekt, som
utsändes från fyrspiralantennen. De utsända
energinivåerna kontrolleras också av
flygsäkerhetsofficern, som med fjärrstyrning kan
bestämma sändareffekten oberoende av
tiduret, fjärrövervaka sändarens funktion samt ge
TEKNISK TIDSKRIFT 19(50 H. 34 953
Fig. 12.
Blockschema för
radaranläggning.
Fig. 13.
Kommandosändare
med antenntorn.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}