
Full resolution (JPEG) - On this page / på denna sida - 1960, H. 38 - Amerikanska fjärr- och markrobotar, av Carl-Axel Reimer
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
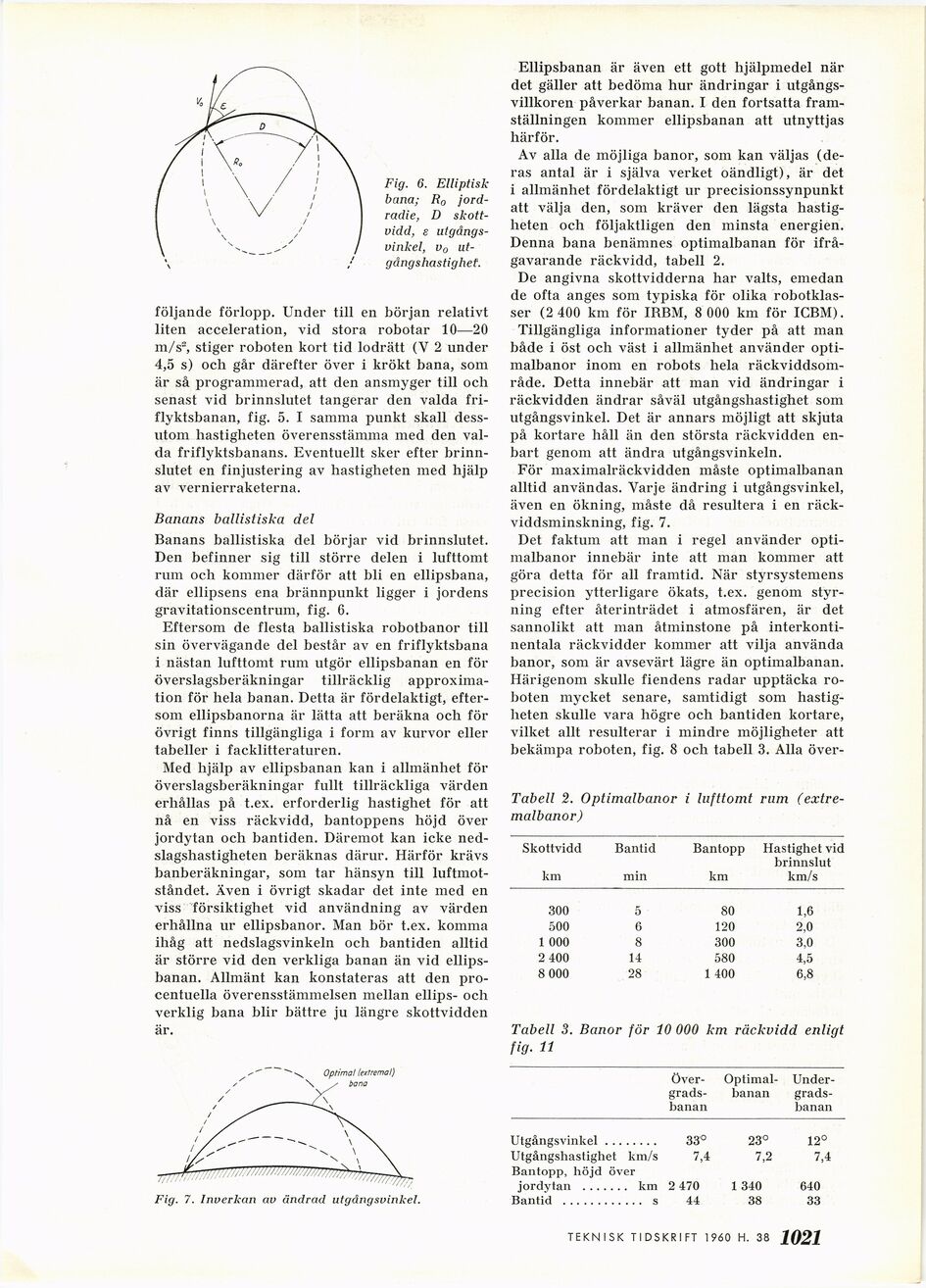
Fig. 6. Elliptisk
bana; R0
jordradie, D
skott-vidd, e
utgångsvinkel, v0
utgångshastighet.
följande förlopp. Under till en början relativt
liten acceleration, vid stora robotar 10—20
m/s2, stiger roboten kort tid lodrätt (V 2 under
4,5 s) och går därefter över i krökt bana, som
är så programmerad, att den ansmyger till och
senast vid brinnslutet tangerar den valda
fri-flyktsbanan, fig. 5. I samma punkt skall
dessutom hastigheten överensstämma med den
valda friflyktsbanans. Eventuellt sker efter
brinnslutet en finjustering av hastigheten med hjälp
av vernierraketerna.
Banans ballistiska del
Banans ballistiska del börjar vid brinnslutet.
Den befinner sig till större delen i lufttomt
rum och kommer därför att bli en ellipsbana,
där ellipsens ena brännpunkt ligger i jordens
gravitationscentrum, fig. 6.
Eftersom de flesta ballistiska robotbanor till
sin övervägande del består av en friflyktsbana
i nästan lufttomt rum utgör ellipsbanan en för
överslagsberäkningar tillräcklig
approximation för hela banan. Detta är fördelaktigt,
eftersom ellipsbanorna är lätta att beräkna och för
övrigt finns tillgängliga i form av kurvor eller
tabeller i facklitteraturen.
Med hjälp av ellipsbanan kan i allmänhet för
överslagsberäkningar fullt tillräckliga värden
erhållas på t.ex. erforderlig hastighet för att
nå en viss räckvidd, bantoppens höjd över
jordytan och bantiden. Däremot kan icke
nedslagshastigheten beräknas därur. Härför krävs
banberäkningar, som tar hänsyn till
luftmotståndet. Även i övrigt skadar det inte med en
viss försiktighet vid användning av värden
erhållna ur ellipsbanor. Man bör t.ex. komma
ihåg att nedslagsvinkeln och bantiden alltid
är större vid den verkliga banan än vid
ellips-banan. Allmänt kan konstateras att den
procentuella överensstämmelsen mellan ellips- och
verklig bana blir bättre ju längre skottvidden
är.
v Optimal IextremaI)
\ y bana
Ellipsbanan är även ett gott hjälpmedel när
det gäller att bedöma hur ändringar i
utgångsvillkoren påverkar banan. I den fortsatta
framställningen kommer ellipsbanan att utnyttjas
härför.
Av alla de möjliga banor, som kan väljas
(deras antal är i själva verket oändligt), är det
i allmänhet fördelaktigt ur precisionssynpunkt
att välja den, som kräver den lägsta
hastigheten och följaktligen den minsta energien.
Denna bana benämnes optimalbanan för
ifrågavarande räckvidd, tabell 2.
De angivna skottvidderna har valts, emedan
de ofta anges som typiska för olika
robotklasser (2 400 km för IRBM, 8 000 km för IGBM).
Tillgängliga informationer tyder på att man
både i öst och väst i allmänhet använder
optimalbanor inom en robots hela
räckviddsområde. Detta innebär att man vid ändringar i
räckvidden ändrar såväl utgångshastighet som
utgångsvinkel. Det är annars möjligt att skjuta
på kortare håll än den största räckvidden
enbart genom att ändra utgångsvinkeln.
För maximalräckvidden måste optimalbanan
alltid användas. Varje ändring i utgångsvinkel,
även en ökning, måste då resultera i en
räckviddsminskning, fig. 7.
Det faktum att man i regel använder
optimalbanor innebär inte att man kommer att
göra detta för all framtid. När styrsystemens
precision ytterligare ökats, t.ex. genom
styrning efter återinträdet i atmosfären, är det
sannolikt att man åtminstone på
interkonti-nentala räckvidder kommer att vilja använda
banor, som är avsevärt lägre än optimalbanan.
Härigenom skulle fiendens radar upptäcka
roboten mycket senare, samtidigt som
hastigheten skulle vara högre och bantiden kortare,
vilket allt resulterar i mindre möjligheter att
bekämpa roboten, fig. 8 och tabell 3. Alla över-
Tabell 2. Optimalbanor i lufttomt rum (extre-
malbanor)
Skottvidd Bantid Bantopp Hastighet vid
brinnslut
km min km km/s
300 5 80 1,6
500 6 120 2,0
1 000 8 300 3,0
2 400 14 580 4,5
8 000 28 1 400 6,8
Tabell 3. Banor för 10 000 km räckvidd enligt
fig. 11
Över- Optimal-
Undergrads-
banan [-gradsbanan-] banan
Fig. 7. Inverkan av ändrad utgångsvinkel.
Utgångsvinkel................33° 23° 12°
Utgångshastighet km/s 7,4 7,2 7,4
Bantopp, höjd över
jordytan ....... km 2 470 1 340 640
Bantid ............ s 44 38 33
TEKNISK TIDSKRIFT 19é0 H. 37 1021
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}